
智能调节仪表是一种采用全新设计理念的高性能、高可靠性智能型工业调节仪表。广泛应用于化工、陶瓷、冶金、石化、热处理等行业的温度、流量、压力、液位等的自动控制系统。
基本误差:±0.2%F.S±1个字
输入信号及测量范围:
热电偶: K(0--1300℃)、S(0--1700℃)、B(0--1800℃)、T(-200--400℃)、E(-200--1000℃)、J(0--800℃)、
Wre325(0--2300℃)、N(0--1300℃)
热电阻: Pt100(-200--600℃)、Cu50(-50--150℃)
标准电流:0--10mA、4--20mA
标准电压:0-5V、1-5V
冷端补偿误差:±1℃
显示方式:2×4位LED数码显示
断偶或超量程显示:Sb
分辨力:1℃、0.1℃
采样周期: 0.5秒
控制方式: 模糊PID控制、位式控制、手动控制
输出方式:
0--10mA电流(RL <1000Ω,可扩展至2000Ω)
4--20mA电流(RL<500,可扩展至1000Ω )
0--22mA自定义电流(软件自由设定)
固态继电器触发
继电器开关量
可控硅过零触发输出(单相、三相)
可控硅移相触发输出(单相、三相三线、三相四线)
手动功能:可由用户通过键盘直接修改输出量
报警功能:上限、下限、正偏差
电源电压:85V-264V
整机功耗:<4W
环境温度:-10-50℃
环境湿度:<85% RH
面板尺寸:A型96mm×96mm;B型48mm×96mm(竖);C型96mm×48mm(横);
D型160mm×80mm(横);E型80mm×160mm(竖);F型72mm×72mm
采用当今的ATMEL单片微机作主机,减少了外围部件,提高了可靠性;
集多种输入型号、输出方式、控制方式于一机;
采用模糊理论和传统PID控制相结合的控制方式,使控制过程具有响应快、超调小、稳态精度高的优
点, 特别对那些常规PID难以控制的大纯滞后对象有明显的控制效果;
采用WATCHDOG电路、软件陷阱与冗余、掉电保护、数字滤波等多种技术,注重现场容错能力,
使整机具有很强的抗干扰能力;
输出接口采用模块化结构,功能配置方便灵活;
双四位LED数码显示,可同时显示测量值与设定值或测量值与输出值;
具有手动/自动无扰动切换,控制参数自整定功能;
20线光柱显示输出百分比值。
以96mm×96mm面板为例:
① PAR(SET)键:
a 在正常显示状态下,按 PAR键立即放开,进入给定值设定状态;在给定值设定状态下,按PAR键立即放开,退出给定值设定状态
b 在正常显示状态下,按 PAR键3秒钟,进入参数设定状态;在参数设定状态下,按PAR键3秒钟退出参数设定状态
C 在设定状态时,按一次 PAR键,存储参数的新设定值并显示下一个参数
② (AUTO/MAN)键:
a 在正常状态时,用于自动控制与手动控制的切换,其中自动控制指位式控制和模糊PID控制, 具体由ctrl参数确定。 手动控制时下显示窗⑥显示输出百分比值,如H 50,H表示手动控制,50表示输出值为50%。
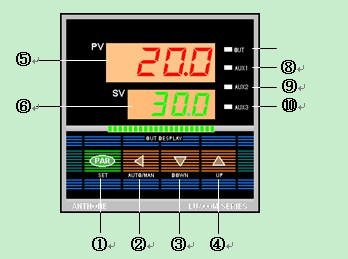
b 在设定状态时,用于左移选择设定的位
③ ▲键:
在参数设定状态下,增加选定位的值;在手动状态下,加大输出值
④ ▼键:
在参数设定状态下,减小选定位的值;在手动状态下,减小输出值
⑤上显示窗:
在正常状态下,显示测量值。
在设定状态下,显示被设定参数的符号。
⑥下显示窗:
在正常状态下,显示设定值或输出百分比值。
在设定状态下,显示被设定参数的设定值。
⑦OUT:
主输出指示灯
⑧AUX1:
辅助输出1指示灯
⑨AUX2:
辅助输出2指示灯
⑩AUX3:
辅助输出3指示灯
(11).输出光柱(20段)
一 自整定
LU-906M(960M)智能调节仪在自整定时,采用位式控制方式进行控制,一般要经过三个震荡周期自整定才能结束。自整定之前,应先设定控制周期(tc)为0,设定回差范围(Hy)为0.5。对于LU-906M智能调节仪还应设定给定值(SEt)。步骤如下:
1 按照第二章中设定给定值的方法,将给定值“SEt”设定为我们所要求的值(LU-960M程序调节仪免此步骤,但应通过手动控制方式,把测量值升到给定值附近)
2 按照第二章中设定参数的方法,将回差“Hy”值设定为0.5,控制周期“tc”值设定为“0”
3 确认仪表其它相关参设定无误、系统连接正常后,将仪表控制参数“ctrL”值设定为“tunE”,退出设
定状态后仪表自整定功能启动。经过三个振荡周期,自整定结束,仪表自动转入模糊PID控制
注:
若要提前终止自整定,必须进入参数设定状态把ctrL从tunE项改为其它项。
因自整定采用的是oN/oFF控制方式,对于不允许发生大控制振荡的系统,请勿进行自整定
自整定时间长短,因系统而异
自整定过程中,不应有异常扰动。例如:负载断开、打开电炉门等
LU960M程序调节仪是把当前的测量值作为给定值进行自整定。因此,在自整定开始之前,应把测 量值通过手动控制方式升到常用的测量值附近;
自整定得到的控制参数,不一定是参数。
二 模糊PID控制的参数调整方法
1 控制参数
1.1 P1
P1参数应根据系统的功率及热容量来确定,系统功率越大,热容量越小,则P1值应越小;反之,系统功率越小,热容量越大,P1值应越大。对于热扰动小的系统,P1应尽量小。
1.2 P2
P2参数影响系统的积分作用,P2越小积分作用越明显。
1.3 rt
rt参数影响系统的响应速度。rt值越小, 响应越快;rt值越大, 响应越慢。
2 控制参数调整
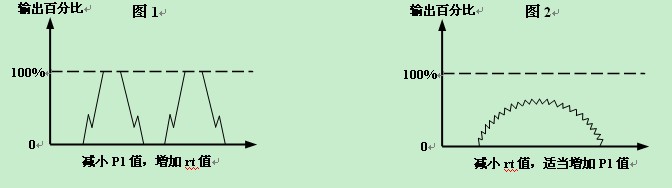
在实际控制中, 可通过观察输出百分比的变化趋势来调整P1、P2、rt参数。
2.1 输出百分比变化过快,并且长时间处于输出或最小输出,即类似于位式控制,如左上图。应减小P1值,增加rt值。
2.2 输出百分比变化过于缓慢,如右上图。应减小rt值并适当增加P1值。
注:
对于多数系统,调整rt、P1参数即可获得满意的效果。
对于多数系统,P1的取值范围在千位数,P2的取值范围在百位数,rt的取值范围在十位数或百位数,一
般可先取P1=2000,P2=200,rt=100进行试验,然后根据输出百分比来调整。
在调整参数时,调整范围应先从大到小。若出现1现象可把P1由2000调为1000,把rt由100调为200,
如果调整后的控制效果如2,则说明P1的取值在1000-2000之间,rt取值在100-200之间。逐渐减小调整范围,即可得到理想的参数。
对于LU-906M智能调节仪,在调整参数时可把LdiS参数设为P,以便观察输出百分比的变化趋势。对于LU-960M程序调节仪,则把LdiS参数设为3。
由于仪表采用的是模糊PID控制算法,输出百分比的变化是振荡式的,因此观察输出百分比的变化趋势
应以总体趋势为准。输出百分比变化时的振荡幅度大小主要是由P1决定的,P1越大,振荡的幅度越大。
三 位式控制
位式控制带回差(Hy),回差范围可任意调整。
控制输出状态如图3

四 手动控制
按一下 键, 仪表即进入手动状态,并可
用"▲"、"▼"键对输出百分比进行修改。如果
要长时间采用手动控制,则应把控制方式参数
Ctrl设定为MAnu。
五 报警
