
IPM(智能功率模块)是一种先进的功率开关器件,兼有GTR(大功率晶体管)高电流、低饱和电压和高耐压的优点,以及MOSFET(场效应晶体管)高输入阻抗、高开关频率和低驱动功率的优点。而且IPM内部集成了逻辑、控制、检测和保护电路,使用起来方便,不仅减少了系统的体积,缩短了开发时间,也增强了系统的可靠性,适应了当今功率器件的发展方向,IPM在功率电子领域得到了越来越广泛的应用。
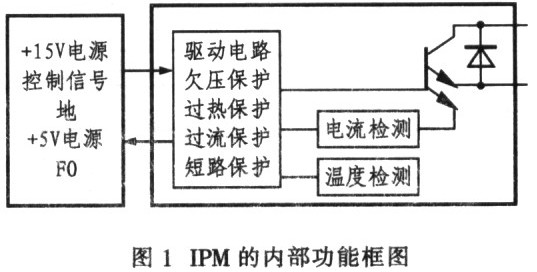
保护电路可以实现控制电压欠压保护、过热保护、过流保护和短路保护。如果IPM模块中有一种保护电路动作,IGBT栅极驱动单元就会关断门极电流并输出一个故障信号(FO)。各种保护功能具体如下:
(1)控制电压欠压保护(UV):IPM使用单一的+15V供电,若供电电压低于12.5V,且时间超过toff=10ms,发生欠压保护,封锁门极驱动电路,输出故障信号。
(2)过温保护(OT):在靠近IGBT芯片的绝缘基板上安装了一个温度传感器,当IPM温度传感器测出其基板的温度超过温度值时,发生过温保护,封锁门极驱动电路,输出故障信号。
(3)过流保护(OC):若流过IGBT的电流值超过过流动作电流,且时间超过toff,则发生过流保护,封锁门极驱动电路,输出故障信号。为避免发生过大的di/dt,大多数IPM采用两级关断模式,过流保护和短路保护操。其中,VG为内部门极驱动电压,ISC为短路电流值,IOC为过流电流值,IC为集电极电流,IFO为故障输出电流。
1 引言
智能功率模块(Intelligent Power Module,IPM)以开关速度快、损耗小、功耗低、有多种保护功能、抗干扰能力强、无须采取防静电措施、体积小等优点在电力电子领域得到越来越广泛的应用。以PM200DSA060型IPM为例。介绍IPM应用电路设计和在单相逆变器中的应用。
2 IPM的结构
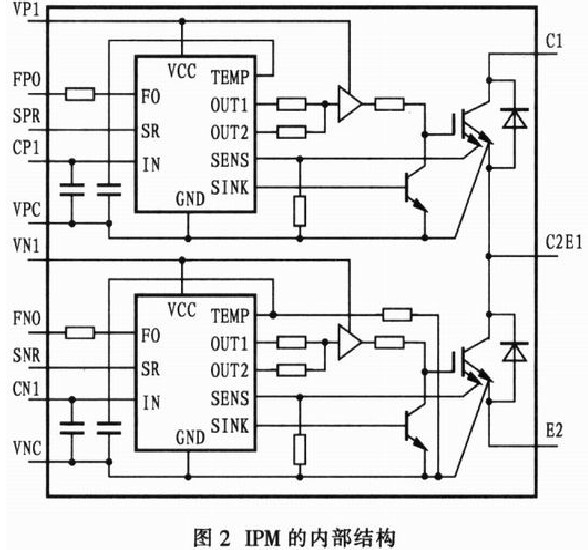
IPM由高速、低功率IGWT、优选的门级驱动器及保护电路构成。其中,IGBT是GTR和MOSFET的复合,由MOSFET驱动GTR,因而IPM具有GTR高电流密度、低饱和电压、高耐压、MOSFET高输入阻抗、高开关频率和低驱动功率的优点。
根据内部功率电路配置情况,IPM有多种类型,如PM200DSA060型:IPM为D型(内部集成2个IGBT).其内部功能框图如图1所示,内部结构如图2所示。内有驱动和保护电路,保护功能有控制电源欠压锁定保护、过热保护、过流保护和短路保护,当其中任一种保护功能动作时。IPM将输出故障信号FO。
IPM内部电路不含防止干扰的信号隔离电路、自保护功能和浪涌吸收电路。为了保证IPM安全可靠。需要自己设计部分外围电路。
3 IPM的外部驱动电路设计
IPM的外部驱动电路是IPM内部电路和控制电路之间的接口,良好的外部驱动电路对以IPM构成的系统的运行效率、可靠性和安全性都有重要意义。
由IPM内部结构图可见.器件本身含有驱动电路.所以只要提供满足驱动功率要求的PWM信号、驱动电路电源和防止干扰的电气隔离装置即可。但是.IPM对驱动电路输出电压的要求很严格:驱动电压范围为13.5V~16.5V.电压低于13.5V将发生欠压保护.电压高于16.5V可能损坏内部部件;驱动信号频率为5Hz-20kHz,且需采用电气隔离装置。防止干扰:驱动电源绝缘电压至少是IPM极间反向耐压值的2倍(2Vces);驱动电流达19mA一26mA;驱动电路输出端的滤波电容不能太大.这是因为当寄生电容超过100pF时。噪声干扰将可能误触发内部驱动电路。
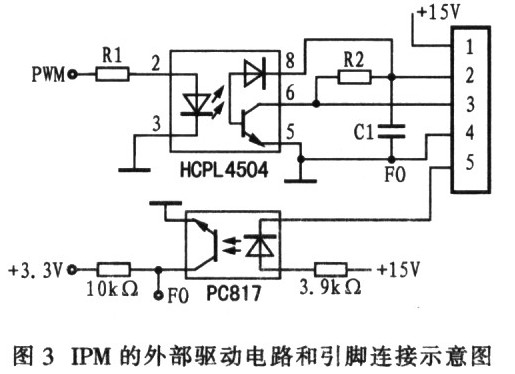
图3所示是一种典型的高可靠性IPM外部驱动电路方案。来自控制电路的PWM信号经R1限流.再经高速光耦隔离并放大后接IPM内部驱动电路并控制开关管工作,FO信号也经过光耦隔离输出。其中每个开关管的控制电源端采用独立隔离的稳压。15V电源,且接1只10μF的退耦电容器 (图中未画出)以滤去共模噪声。Rl根据控制电路的输出电流选取.如用DSP产生PWM.则R1的阻值可为330Ω。R2根据IPM驱动电流选值,一方面应尽可能小以避免高阻抗IPM拾取噪声.另一方面又要足够可靠地控制IPM。可在2kΩ~6.8kΩ内选取。C1为2端与地间的O.1μF滤波电容器,PWM隔离光耦的要求是tPLH10kV/μs,可选用HCPIA503型、 HCPIA504型、PS204l型(NEC)等高速光耦,且在光耦输入端接1只O.1μ的退耦电容器(图中未画出)。FO输出光耦可用低速光耦(如 PC817)。IPM的内部引脚功能如表1所示。

图3的外部接口电路直接固定在PCB上且靠近模块输入脚.以减少噪声和干扰.PCB上布线的距离应适当,避免开关时干扰引起的电位变化。
另外,考虑到强电可能造成外部驱动电路到IPM引线的干扰,可以在引脚1~4间,3~4间,4~5间根据干扰大小加滤波电容器。
4 IPM的保护电路设计
由于IPM本身提供的保护电路不具备自保护功能.所以要通过外围硬件或软件的辅助电路将内部提供的:FO信号转换为封锁IPM的控制信号.关断IPM,实现保护。
4.1 硬件
IPM有故障时,FO输出低电平,通过高速光耦到达硬件电路,关断PWM输出,从而达到保护IPM的目的。具体硬件连接方式如下:在PWM接口电路前置带控制端的3态收发器(如74HC245)。PWM信号经过3态收发器后送至IPM接口电路.IPM的故障输出信号FO经光耦隔离输出送入与非门。再送到3态收发器使能端OE。IPM正常工作时.与非门输出为低电平。3态收发器选通;IPM有故障时。与非门输出为高电平。3态收发器所有输出置为高阻态。封锁各个IPM的控制信号.关断IPM.实现保护。
4.2 软件
IPM有故障时.FO输出低电平,FO信号通过高速光耦送到控制器进行处理。处理器确认后。利用中断或软件关断IPM的PWM控制信号.从而达到保护目的。如在基于DSP控制的系统中.利用事件管理器中功率驱动保护引脚(PDPINT)中断实现对IPM的保护。通常1个事件管理器严生的多路PWM可控制多个IPM工作.其中每个开关管均可输出FO信号,每个开关管的FO信号通过与门.当任一开关管有故障时输出低电平,与门输出低电平.将该引脚连至PDPINT,由于PDPINT为低电平时DSP中断,所有的事件管理器输出引脚均被硬件设置为高阻态,从而达到保护目的。
以上2种方案均利用IPM故障输出信号封锁IPM的控制信号通道.因而弥补了IPM自身保护的不足,有效地保护了器件。
5 IPM的缓冲电路设计
在IPM应用中,由于高频开关过程和功率回路寄生电感等叠加产生的di/dt、dv/dt和瞬时功耗会对器件产生较大的冲击,易损坏器件.因此需设置缓冲电路(即吸收电路),目的是改变器件的开关轨迹,控制各种瞬态过压,降低器件开关损耗.保护器件安全运行。
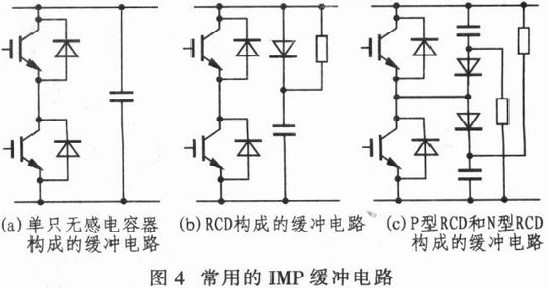
图4为常用的3种IPM缓冲电路。图4(a)为单只无感电容器构成的缓冲电路,对瞬变电压有效且成本低,适用于小功率IPM。图4(b)为RCD构成的缓冲电路,适用于较大功率IPM.缓冲二极管D可箝住瞬变电压,从而抑制由于母线寄生电感可能引起的寄生振荡。其RC时间常数应设计为开关周期的1/3,即r=T/3=1/3f。图4(c)为P型RCD和N型RCD构成的缓冲电路,适用于大功率IPM。功能类似于图4(b)所示的缓冲电路,其回路电感更小。若同时配合使用图4(a)所示的缓冲电路。还能减小缓冲二极管的应力,缓冲效果更好。
在图4(c)中,当IGBT关断时.负载电流经缓冲二极管向缓冲电容器充电,同时集电极电流逐渐减少,由于电容器二端的电压不能突变.所以有效地限制了IGBT集电极电压上升率dv/dt。也避免了集电极电压和集电极电流同时达到值。IGBT集电极母线电感、电路及其元件内部的杂散电感在IGBT开通时储存的能量,这时储存在缓冲电容器中。当IGBT开通时,集电极母线电感以及其他杂散电感又有效地限制了IGBT集电极电流上升率 di/dt.同样也避免了集电极电压和集电极电流同时达到值。此时,缓冲电容器通过外接电阻器和IGBT开关放电,其储存的开关能量也随之在外接电阻器和电路、元件内部的电阻器上耗散。如此,便将IGBT运行时产生的开关损耗转移到缓冲电路.在相关电阻器上以热的形式耗散,从而保护IGBT安全运行。
图4(c)中的电阻值和电容值按经验数据选取:如PM200DSA060的电容值为0.221xF~0.47xF,耐压值是IGBT的 1.1倍~1.5倍,电阻值为10?—20?,电阻功率按P=fCU2xlO-6计算,其中f为IGBT工作频率,u为IGBT的工作峰值电压。C为缓冲电路与电阻器串联电容。二极管选用快恢复二极管。为了保证缓冲电路的可靠性,可以根据功率大小选择封装好的图4所示的缓冲电路。
另外,由于母线电感、缓冲电路及其元件内部的杂散电感对IPM尤其是大功率IPM有极大的影响,因此愈小愈好。要减小这些电感需从多方面人手:直流母线要尽量地短;缓冲电路要尽可能地靠近模块;选用低电感的聚丙烯无极电容器、与IPM相匹配的快速缓冲二极管及无感泄放电阻器。
6 IPM在单相全桥逆变器中的应用
图5所示的单相全桥逆变电路主要由逆变电路和控制电路组成。逆变电路包括逆变全桥和滤波电路,其中逆变全桥完成直流到交流的变换.滤波电路滤除谐波成分以获得需要的交流电;控制电路完成对逆变桥中开关管的控制并实现部分保护功能。
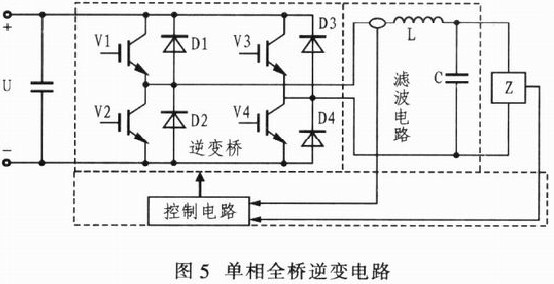
图中的逆变全桥由4个开关管和4个续流二极管组成,工作时开关管在高频条件下通断.开关瞬间开关管电压和电流变大,损耗大,结温升高,加上功率回路寄生电感、振荡及噪声等.极易导致开关管瞬间损坏,以往常用分立元件设计开关管的保护电路和驱动电路,导致电路庞大且不可靠。
笔者采用一对PM200DSA060双单元IPM模块分别代替图中Vl、D1、V2、D2组合和V3、D3、v4、D4组合构成全桥逆变电路,利用DSP对IPM的控制,完成了中频率20kW、230V逆变器的设计和调试,采用了如上所述的驱动电路、图4(c)中的缓冲电路和基于DSP控制的软件IPM保护电路。设计实践表明:使用IPM可简化系统硬件电路、缩短系统开发时间、提高可靠性、缩小体积,提高保护能力。
IPM智能功率模块是先进的混合集成功率器件,由高速、低功耗的IGBT芯片和优化的门极驱动以及保护电路构成。由于采用了能连续监测功率器件电流的、有电流传感功能的IGBT芯片,从而可实现高效的过流保护和短路保护。由于IPM智能功率模块集成了过热和欠压锁定保护电路,因而系统的可靠性得到了进一步提高。
使用智能功率模块可以使生产厂家降低在设计、开发和制造上的成本。与普通的IGBT相比,在系统性能和可靠性上有进一步的提高。由于IPM集成了驱动和保护电路,使得用户的产品设计变得相对容易,并能缩短开发周期;由于IPM通态损耗和开关损耗都比较低,使得散热器减小,因而系统尺寸也减小;所有的IPM均采用同样的标准化与逻辑电平控制电路相联的栅极控制接口,在产品系列扩充时无需另行设计电路。IPM在故障情况下的自保护能力,也减少了器件在开发和使用中过载情况下的损坏机会。
IPM内置的栅极驱动电路和保护电路可以对许多违反IGBT模块安全工作区(SOA)的运行模式加以保护,智能功率模块的开关安全工作区和短路安全工作区定义概述如下:
开关安全工作区
开关(关断)安全工作区通常定义为在重复关断运行时的允许瞬时电压和电流。对于IPM,内置栅极驱动取消了因不正确的栅极驱动而造成的许多电压和电流的危险组合,此外,工作电流受过流保护电路的限制。根据这些限制条件,开关安全工作区可用图1中的波形来定义,只要主电路直流母线电压低于数据手册中的Vcc(port)指标,每个IPM功率单元的C-E间关断瞬时电压低于VCES指标,Tj小于125℃,控制电源|稳压器电压在13.5V和16.5V之间,IPM将会安全工作。波形中的IOC是IPM的过流故障不会动作的允许电流。换句话说,它正好处在OC动作数值以下。该波形定义了硬关断操作的最坏情况,当电流高于OC动作数值时,IPM将关断该电流。
IPM智能功率模块的自保护功能
自保护特点
IPM有精良的内置保护电路以避免因系统失灵或过应力而使功率器件损坏的情况。内置保护功能的框图如图3所示。如果IPM模块其中有保护电路动作,IGBT栅极驱动单元就会关断电流并输出一个故障信号(FO)。
控制电源欠压锁定
内部控制电路由一个15V直流电源供电。如果由于某种原因这一电源电压低于规定的欠压动作数值(UV),则该功率器件将被关断并输出一个故障信号。如果小毛刺干扰时间小于规定的tdUV,则不影响控制电路工作,欠压保护电路也将不工作。
保护后,要恢复正常工作,电源电压必须超过欠压复位数值(UVr)。欠压保护电路在控制电源上电和掉电期间都要保持工作。
过热保护
在靠近IGBT芯片的绝缘基板上安装温度传感器。如果基板温度超出过热动作数值(OT),IPM内部控制电路将截止栅极驱动,不影响控制输入信号,直到温度恢复正常,从而保护了功率器件。当温度回落至过热复位数值(OTr)以下,并且控制输入为高电平(关断状态),功率器件将接收下一个低电平(开通状态)输入信号并恢复正常工作。
过流保护
如果流过IGBT的电流超出过流动作数值(OC)的时间大于toff(OC),IGBT将被关断。
超过OC数值但时间小于toff(OC)的电流短脉冲并不危险,过流保护电路将不予处理。当检测出过电流时,IGBT将被软关断,同时输出一个故障信号。受控的软关断能控制关断大电流而发生的浪涌电压。
短路保护
如果负载发生短路而导致上下臂同时导通,IPM内置短路保护电路将关断IGBT。如果流经IGBT的电流超出短路保护动作数值(SC),软关断立即启动并输出一个故障信号。为缩短SC检测与SC关断之间的响应时间,IPM采用了实时电流控制电路(RTC)。SC动作时,实时电流控制电路直接监测IGBT驱动的末级电路,因此响应时间可以减小到不足100ns。
IPM智能功率模块的驱动电路设计
驱动电路的要求
一个低电平输入信号将使IGBT开通。典型地,IPM的输入脚被用一个连接到控制电源正侧的电阻拉高,把控制输入拉低则产生一个“开通”的信号。
故障输出信号FO表现为集电极开路,如果发生故障,开路集电极器件即行接通,故障输出脚从控制电源正端吸收电流。
接口电路设计中布线很重要。为避免dv/dt噪声耦合到控制电路,在布线中一定要仔细考虑:在上臂接口电路之间、上臂和下臂接口电路之间的寄生电感都会产生噪声的问题。
驱动电路的原理
用于空调机变频控制器的三菱公司的六合一IPM智能功率模块——PM20CTM060驱动电路的原理图。开关控制信号和故障信号是通过隔离接口电路同系统控制器连接的。TLP559的特点是开关速度高,每秒达1M次。TLP521则具有电流传输比(CTR)大的特点,CTR值达200,图中的R508是一个上拉电阻,它是确保在IPM智能功率模块没有故障时VFO的输出为高电平。
驱动电路印刷电路板的设计
IPM模块的静电防护
带静电的人体或其它过大的电压施加到栅-源(或发射极)上可能毁坏芯片。抗静电的基本措施就是尽量阻止静电的产生并尽快将电荷释放掉。
在焊接IPM智能模块时,应保证烙铁头良好接地,烙铁温度应控制在330℃~350℃温度范围内,焊接时间小于10s;在电控箱体的装配过程中,应将测试设备和人体良好接地,推荐在工作台和周围的地板上铺放导电毯,并将之接地。
结 语
随着变频技术的日趋成熟,IPM在变频家电中的应用也越来越广泛,这也必将推动IPM技术的发展,早日开发出性价比更高的智能功率模块。
随着现代电力电子技术的飞速发展,以绝缘栅双晶体管(IGBT)为代表的功率器件在越来越多的场合得到广泛地应用。IGBT是VDMOS与双极晶体管的组合器件,集MOSFET与GTR的优点于一身,既具有输入阻抗高,开关速度快,热稳定性好和驱动电路简单的长处,又具有通态电压低,耐压高和承受大电流的优点,特别适合于电机控制。现代逐渐得到普遍推广的变频空调,其内部的压缩机控制单元就是采用以IGBT为主要功率器件的新型智能模块(IPM)。
IPM(智能功率模块)即Intelligent Power Module的缩写,它是将输出功率器件IGBT和驱动电路、多种保护电路集成在同一模块内,与普通IGBT相比,在系统性能和可靠性上均有进一步提高,而且由于IPM通态损耗和开关损耗都比较低,使散热器的尺寸减小,故整个系统的尺寸减小。下面是IPM内部的电路框图:
IPM内部含有门极驱动控制、故障检测和多种保护电路。保护电路分别检测过流、短路、过热、电源欠压等故障,当任一故障出现时,内部电路会封锁驱动信号并向外送出故障信号,以便外部的控制器及时处理现场,避免器件受到进一步损坏。下图是变频空调室外压缩机控制驱动主电路的原理图。
220V交流电压经过由D1~D4和电解电容C1组成的桥式整流和阻容滤波电路后成为给IPM供电的直流电压,六个开关管按照一定规律通断,分别在U、V、W三相输出一系列的矩形信号,通过调整矩形波的频率与占空比达到调节输出电压频率和幅度的目的,即现在应用最广泛的PWM(PULSE WIDTH MODULATE 脉冲宽度调制)控制技术,PWM控制技术从控制思想上可以分成四类:等脉宽PWM法、正弦波PWM法、磁链追踪PWM法和电流追踪型PWM法。不管采用何种控制方式,都必须注意U、V、W任意一相上下两个桥臂不能同时导通,否则直流电源将在IPM内部形成短路,这是不允许的。为了避免电源元件的切换反应不及时可能造成的短路,一定要在控制信号之间设定互锁时间,这个时间又叫换流时间,或者叫死区时间。
死区时间,一般情况下软件工程师在程序设计时就会考虑并写进控制软件。但是由于不同公司生产的IPM,对死区时间长短的要求不尽相同,这样软件就会出现多个版本,不便于管理,并且影响CPU的MASK(掩模)工作。为了控制软件的统一性,有的软件工程师将死区时间放到芯片外扩展的E2中,对不同公司的IPM,只需改变一下E2中的数据,即可简单实现死区时间的匹配。这种方法的缺点是生产成本较高,在实际应用时受到一定限制。随着集成电路工艺的不断改进,各种逻辑门集成电路的价格不断地下降,使采用硬件电路实现死区时间设定应用到生产上成为可能,这种方法的优点是电路简单,延时时间方便可调,成本低廉。
控制过程如下:
因为IPM控制输入低电平有效。平时CPU输出控制脚1处于高电平,逻辑或门输出高电平,IPM输入锁定。当CPU输出低电平有效时,高频瓷片电容通过电阻放电,逻辑或门输入脚2仍然维持高电平,逻辑或门输出高电平,IPM输入仍然锁定。当电容放电完毕,或门输入脚2变为低电平时逻辑输出才为低电平,IPM控制输入有效,因此,电容放电时间就是CPU控制输出到IPM控制输入有效的延时时间。当CPU控制输出关断即输出重新变为高电平时,尽管电容处于充电状态而使或门输入脚2处于低电平,逻辑或门输出仍然立即变为高电平,锁定IPM输入。上述电路只是六路IPM控制输入的其中一路,其他五路做同样处理,通过调整R、C的参数,就可以实现所需要的延时时间。下面是一相电路控制时序图:
下面我们推导图3所示电路中电阻和电容的选择:
根据电工学公式,由电阻、电容组成的一阶线性串联电路,电容电压Uc可以用下式表示:
Uc=Uoexp(-t/τ) (1)
τ为时间常数 τ=RC
在图3所示电路中,我们选择ST公司生产的高速CMOS或门电路,它的关门电平为1.35V(电源电压为4.5V),即当输入电压降至1.35/4.5U0=0.3 U0时,输出电平转换有效,因此由式(1)可以推导出:
td =-τln0.3=1.2RC (2)
上式就是我们选择R、C值的指导公式。
例如:需要延时时间为10us,选择精度为5[%]高频瓷片电容,容量为103P,则
R= 10 *10e-6/1.2C=833Ω,这样R就可选择精度为1[%]、阻值为820Ω的金属膜电阻。
小结:按照上述方案设计的硬件延时电路,结构简单,成本低廉,可靠性极高,在实际使用时只需简单调换一下电阻的阻值就可实现对死区时间要求不同的IPM的控制。