自由转子陀螺仪是指使用无接触无框架支承的陀螺仪。转子和壳体的支承部分通常为球形,转子可相对壳体自由转动。可以采用静电支承、磁支承、静压或动压气体支承实现自由转子陀螺仪。这种陀螺仪的干扰力矩小,漂移率低,但机械加工精度要求极高,适用于高精度惯性导航系统。
自由转子陀螺仪是无框架、无接触支承的一类陀螺。其支承部分通常为具有两个转动自由度的球形状。如静电陀螺、超导陀螺和动压气浮陀螺等。此类陀螺可直接利用转子和壳体的相对运动来输出信号,陀螺相对惯性空间的稳定性很高,测量精度也高。现代动压气浮陀螺的漂移率可达0.01度/小时以上,静电陀螺的漂移率可高达0.001度/小时。但是自由转子陀螺仪结构复杂,对材料和加工工艺要求高,成本昂贵,常用于高精度陀螺稳定平台和导航系统。
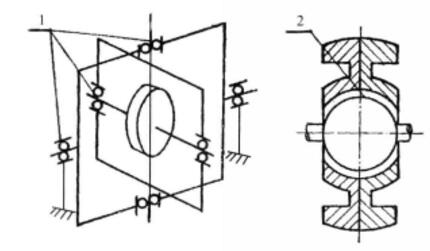
一个简化了的自由转子陀螺仪的结构如右图所示。转子是一种能获得角动量的凸缘型转子,绕固定的球支承具有任意的角自由度。所谓球支承,其作用相当于一个万向轴承。陀螺仪内部空间中充有气体,一般采用氢气体或氮气体。当转子旋转的时候,气体的有限粘性使上述气体抽进球与转子之间的气隙。于是,就在靠近气隙的狭窄的一边形成一个高压区,这个高压区支撑着转子,力图使转子对球保持定中心。因此,旋转着的转子就浮在气体薄膜上而不与球直接接触。
两个非磁性材料做的感应杯各安装在转子的一边。一个感应杯就作为陀螺电机的转子,另一个感应杯则是一个加精确力矩给陀螺转子的机构。自由转子陀螺仪采用电容式传感器来感受陀螺转子绕垂直于标称旋转矢量的轴产生的角运动。
自由转子陀螺仪主要有内转子式的静电悬浮陀螺仪和外转子式的动压气浮陀螺仪。以下介绍动压气浮陀螺仪。
动压气浮陀螺仪,一般简称动压陀螺仪,用一个球形支承代替二自由度框架式陀螺的三对轴承,悬浮气一个自由转子,使其具有3个自由度。图为自由陀螺仪与自由转子陀螺仪支承方式对比。
动压陀螺仪没有框架结构,减少了仪表转动部件,从而简化了设计,减少了机械加工与装配的工作量。动压陀螺仪的转子由一层气膜支承,运转过程中完全没有机械接触和磨损,从而延长了陀螺仪的使用寿命。
自由转子陀螺仪具有结构简单、没有磨损、工作寿命长等优点,但其角度活动范围有限,而且当转、定子相对位置不在零位时,电机驱动力矩对转子形成扰动,会限制其精度。