 其次是积分运算电路,如图 2 所示。积分运算在控制系统中能够对误差进行积累,从而实现对系统的调节。其公式体现了积分运算的特性,对于处理一些需要长期积累效应的控制问题非常有效。
其次是积分运算电路,如图 2 所示。积分运算在控制系统中能够对误差进行积累,从而实现对系统的调节。其公式体现了积分运算的特性,对于处理一些需要长期积累效应的控制问题非常有效。 然后是微分运算电路,微分运算与积分运算互为逆运算。如图 3 所示,它能够对信号的变化率进行快速响应,对于一些需要快速跟踪变化的控制系统有着重要的作用。其公式反映了微分运算的本质,在实际应用中可以有效提高系统的响应速度。
然后是微分运算电路,微分运算与积分运算互为逆运算。如图 3 所示,它能够对信号的变化率进行快速响应,对于一些需要快速跟踪变化的控制系统有着重要的作用。其公式反映了微分运算的本质,在实际应用中可以有效提高系统的响应速度。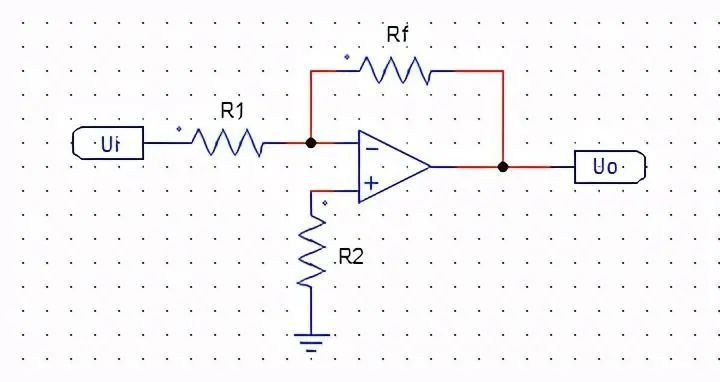 是 PID 运算,重写 PID 数学表达式后可以发现,PID 由比例、积分和微分三种运算之和构成。据此,我们可以将前面提到的三种电路整合在一起,得到 PID 调节器,如图 4 所示。从图中可以推出相应的公式,这个 PID 调节器电路在模拟电源的环路中经常被使用。
是 PID 运算,重写 PID 数学表达式后可以发现,PID 由比例、积分和微分三种运算之和构成。据此,我们可以将前面提到的三种电路整合在一起,得到 PID 调节器,如图 4 所示。从图中可以推出相应的公式,这个 PID 调节器电路在模拟电源的环路中经常被使用。 其实在实际项目中,更常用到的是 PI 调节器,这时只需要将 C1 移除即可。如果要想使用 PD 调节器,只需将 R1 移除。这体现了 PID 运算电路的灵活性和可调整性,能够根据不同的控制需求进行优化和改进。
其实在实际项目中,更常用到的是 PI 调节器,这时只需要将 C1 移除即可。如果要想使用 PD 调节器,只需将 R1 移除。这体现了 PID 运算电路的灵活性和可调整性,能够根据不同的控制需求进行优化和改进。免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。