此处介绍的项目是一个与Arduino兼容的电机
控制板。该板由ATMEGA328
微控制器,LMD18201 H桥和2 X电位计组成。该闭环伺服系统使用安装在变速箱输出轴上的反馈电位计提供位置控制,并通过转动参考
电位器的轴来提供位置控制,电动机输出轴输出轴遵循参考电位计。该项目也可以用于其他需要Arduino兼容硬件和H桥的应用程序。
该项目需要一种特殊的机制,其中DC电动机的输出轴与电位器轴机械地使用还原轴结合。大约还原比15-50:1。当转动参考锅时,电动机轴遵循位置。这将提供270度的旋转。借助多电力电位计,可以进行多旋转。
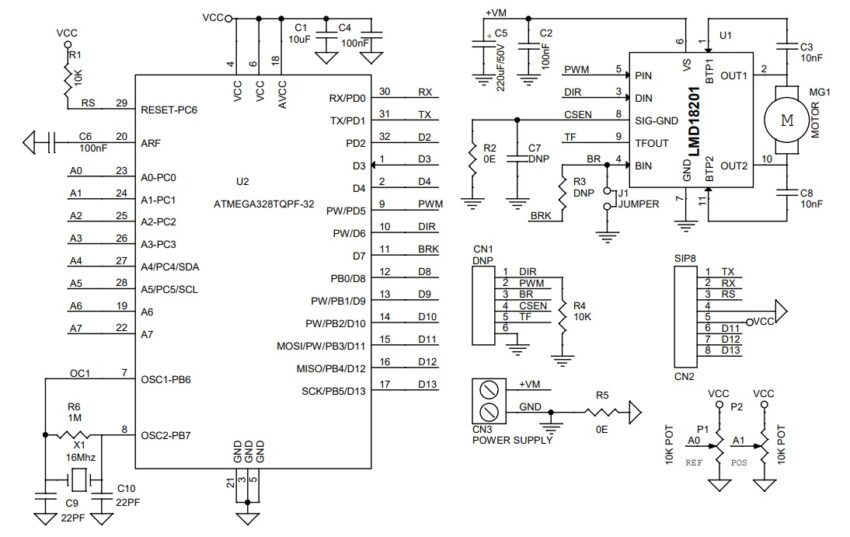
Arduino D5 = PWMArduino D6 =方向arduino d8 =制动(未使用 - 选项)Arduino A0参考电位器,A1反馈电位计特征
电源电动机12V至40V(48V)电动机负载3A(峰值6A)逻辑供应5V DC @ 20mA在刹车的跳线上,刹车,关闭用于正常操作Arduino IDE的板上编程连接器电动机和电源的螺丝
端子2 x 3针雄性标头用于反馈和参考电位计Arduino兼容PCB尺寸47.63 x 42.55mm4 x 3mm安装孔连接和其他详细信息
CN1:可选不安装CN2:编程连接器引脚1 = TX,PIN 2 = RX,PIN 3 =重置,引脚4 = GND,PIN 5 = VCC,PIN 6 = D11,PIN 7 = D12,PIN 8 = D13CN3:引脚1 =电动电源,引脚2 = GNDMG1:引脚1 =电机1,引脚2 =电动机2P1:参考电位器P2:反馈电位器J1:必须关闭跳线以实现制动器以进行正常操作。