氮化镓 FET 在许多电力
电子应用中持续受到关注,但 GaN 技术仍处于其生命周期的早期阶段 [1]。虽然基本 FET 性能指标还有很大提升空间,但更有前景的途径是开发 GaN 功率 IC。
现代硅基 GaN 器件的横向 FET 结构适合功率和信号器件的单片集成,并且集成 GaN 功率 IC 开始出现商业化 [2]、[3]。这种集成有望减小尺寸和成本,同时提高可靠性和性能。
本文提供了一个示例,说明引入集成 FET 和栅极驱动器 IC 带来的好处。该 IC 主要被设计为用于间接飞行时间应用的激光驱动器,能够从 40 V 总线驱动 10 A 脉冲电流。当
开关电流为 10 A 时,该 IC 的输出上升和下降时间低于 600 ps,其输出 RDS(on) 约为 50 mΩ。并且可以以超过 100 MHz 的频率进行切换。该 IC 是可适应不同电源和逻辑系列输入的组件系列的一部分。该系列的所有当前成员均具有相同的 2×3 BGA 芯片级封装(见图 1),占用面积为 1 mm × 1.5 mm。该封装具有出色的热性能和极低的电感。 25°C 时 EPC21601 激光驱动器的主要规格。
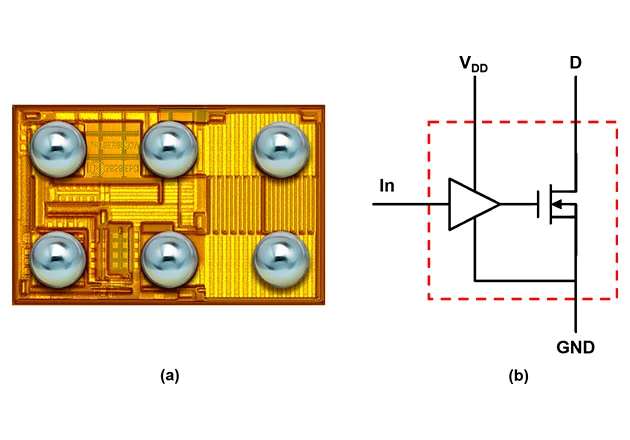
图 1:EPC21601 全集成 GaN 功率开关的 IC 照片 (a) 和框图 (b)。
激光驱动器要求
激光雷达的激光驱动器是脉冲功率应用。图 2 显示了简化的激光驱动器。初,开关 Q1 关闭,C1 充电至输入电压 VIN。命令信号命令导致开关Q1通过激光
二极管D1对C1完全或部分放电。电感器 L1 代表 C1D1Q1 环路的杂散电感。现代激光雷达系统需要高电流和短脉冲的窄脉冲。简单来说,驱动器速度越快,分辨率就越好;电流越大,范围越远。根据激光雷达系统的不同,脉冲宽度范围可以从 1 ns 到 100 ns,以及从 1 A 到超过 100 A。 激光驱动器的简化原理图
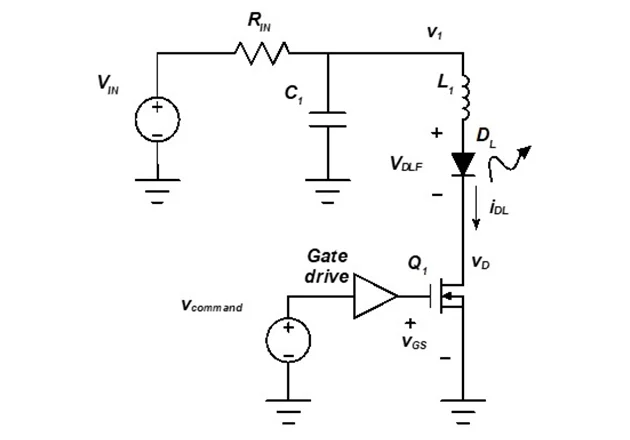
图 2:激光驱动器的简化原理图
激光雷达的两种主要形式在当今的激光雷达行业中占据主导地位:直接飞行时间(DTOF)和间接飞行时间(ITOF)[4]。典型的 DTOF 激光雷达发送单独的脉冲并对反射进行计时,以计算到目标的距离。 ITOF 激光雷达的工作原理是比较发射和反射脉冲串的相位。由于能够使用简化的接收器并因此实现更低的成本,ITOF 激光雷达近显示出巨大的增长。成像芯片是基于低成本 CMOS 相机成像技术而开发的,该技术使成像芯片能够提供每个像素的距离信息。这又允许捕获整个距离信息帧。这些有时被称为“闪光激光雷达”,因为它们使用激光作为闪光灯来照亮场景。尽管初的设计是使用硅激光驱动器完成的,但这些驱动器的射程较短,并且由于激光脉冲较弱且形状不佳,图像质量较差,帧速率较低。事实证明,GaN FET 在这些设计中非常有效,能够以经济高效的方式实现更高的电流和更快的脉冲以及更锐利的边缘。
ITOF 激光雷达的大部分增长都处于中等范围,从不到 1 米到数十米。这些系统的范围从单点距离测量系统到百万像素 TOF 相机,但由于能够在一个检测周期中捕获宽视场,因此趋势倾向于多点和成像系统。这一趋势青睐能够同时照亮整个场景的
光源,这非常适合垂直腔表面发射激光器 (VCSEL)。
单个 VCSEL 非常小,但由于它们从芯片表面发射,因此可以将许多 VCSEL 集成在单个芯片上以增加光输出。对于小型便携式系统,典型的脉冲电流要求范围为 2-10 A。虽然单个 VCSEL 在低电流下的压降很小,但等效串联电阻会在较高电流下导致显着的压降。 VCSEL 的串联可以进一步增加压降。通常用于连接 VCSEL 的焊线会因增加的电感而产生额外的压降。如今,VCSEL 的压降范围为 3 V 至 30 V,许多应用需要 ≥ 10 V。在突发模式下工作时,脉冲频率范围可能从几 MHz 到超过 100 MHz。 ITOF操作概览图。
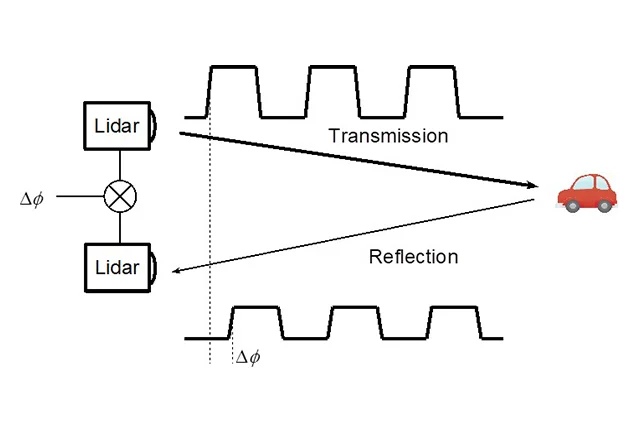
图 3:ITOF 操作概览图。
由于 ITOF 成像仪使用相位差检测,因此波形的形状很重要。矩形脉冲的使用极大地简化了相位检测,并且具有使用开关作为调制器的额外好处。这简化了激光驱动器并大大降低了系统总功率要求。总而言之,ITOF 激光雷达系统的激光驱动器应能够从高达 30V 的总线生成 2 至 10 A 脉冲,开关频率可能≥ 100 MHz,脉冲宽度为 2 ns 或更小。这是一个广泛的规格,通常的方法是为每个应用定制基于 GaN 的激光驱动器设计。对于硅基激光驱动器来说,大部分设计空间是完全无法实现的。
整合的好处
具有所需电流和电压额定值的现代 eGaN 功率 FET 的上升和下降时间小于 1 ns,因此可以轻松满足上述要求。事实上,单个 0.81 mm2 eGaN FET(例如符合汽车标准的 EPC2203)就可以满足上述整个设计空间的要求。然而,此类 FET 的驱动要求与生成发送脉冲的数字子系统的输出并不直接兼容,因为这些输出往往是 3.3 V 或更低的低压逻辑,并且具有低驱动电流能力。因此,需要栅极驱动器将数字信号连接至 FET。这是一个问题,因为很少有栅极驱动器能够驱动 eGaN FET 高达 100 MHz 及以上,同时保持快速的上升和下降时间。少数具有所需驱动能力的设备消耗的功率水平令人无法接受。此外,栅极驱动器和 FET 之间的物理距离会增加栅极环路的电感,从而进一步降低性能。,栅极驱动器占用空间(比 FET 更多的空间)、增加成本并降低可靠性。 GaN 技术实现了栅极驱动器与主 FET 的集成,从而提高了性能、减少了部件数量并获得了所有随之而来的好处。
表现
Efficient Power Conversion 开发了一系列单片 GaN IC 激光驱动器,如图 1 所示。主要版本的主要初步规格如表 I 所示。
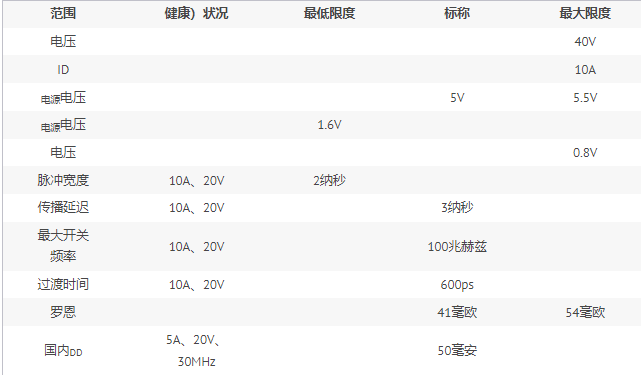
表 I:25°C 时 EPC21601 激光驱动器的主要规格。 该 IC 系列共有三个成员:(1) 2.5 V 逻辑输入和 IC 的 5V 电源,(2) 5 V 逻辑输入和 12 V 电源,以及 (3) 低压差分信号 (LVDS) 输入使其能够在嘈杂的数字环境中直接由高速数字 IC 驱动。所有三种变体均采用相同的 2×3 BGA 芯片级封装,占用面积为 1 mm × 1.5 mm,并且仅需要一个旁路
电容器。
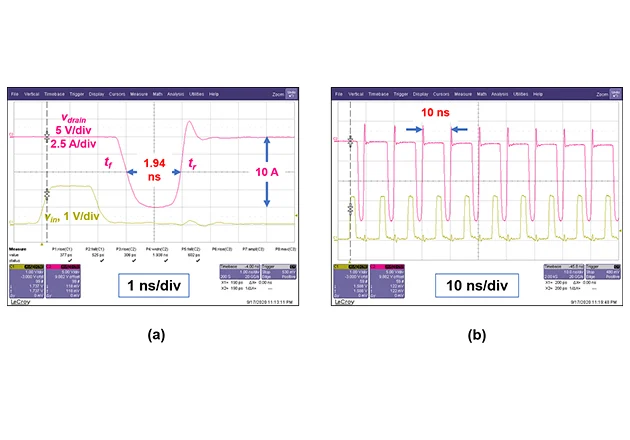
图 4 显示了驱动 2 Ω 低电感负载代替激光器的一些典型波形。电源电压为 20 V 时,产生的电流脉冲的幅度为 10 A。图 (4a) 显示单个脉冲。漏极电压vdrain 下降时间tf 测量导通时间,tr 测量关断时间。在额定电流下,tf = 602 ps,tr = 306 ps。激光雷达发射器通常使用突发模式,原因之一是需要防止激光过热。图 (4b) 显示了 10 个周期的 100 MHz 突发。该 IC 可以连续工作在 100 MHz 和 10A 下,但突发模式工作是为了防止负载功率因过度加热而耗散。
单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 20V 电??源以及 2 Ω 负载。黄色迹线是输入 (1 V/div),红色迹线是漏极电压(5 V/div 或 2.5 A/div) 图 4:单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 20V 电??源以及 2 Ω 负载。黄色迹线是输入 (1 V/div),红色迹线是漏极电压(5 V/div 或 2.5 A/div)
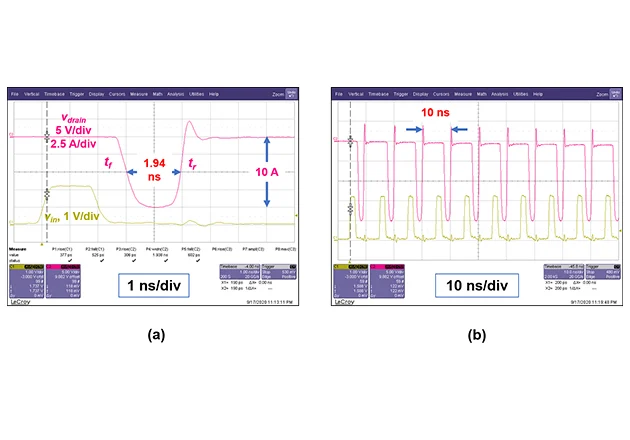
图 5 显示了驱动垂直腔表面发射激光器 (VCSEL) 的一些典型波形。图 (5a) 显示单个脉冲,图 (5b) 显示 10 个周期的 100 MHz 突发。 VCSEL 封装包含一条键合线,该键合线会增加相当大的电感,从而导致漏极波形振铃和较慢的光输出上升时间。请注意,由于该电感和 10 V 转换而产生的较高阻抗会导致开启时间(下降时间 tf)小于 300 ps。 驱动垂直腔表面发射激光器 (VCSEL) 的波形。单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 10V 电源以及 VCSEL 负载。黄色迹线是输入 (1 V/div),红色迹线是漏极电压 (5 V/div),蓝色迹线是光接收器输出 (5 mV/div)。
图 5:驱动垂直腔表面发射激光器 (VCSEL) 的波形。单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 10V 电源以及 VCSEL 负载。黄色迹线是输入 (1 V/div),红色迹线是漏极电压 (5 V/div),蓝色迹线是光接收器输出 (5 mV/div)。