速度控制器长期以来一直利用直流电机的反向电动势特性来控制其速度。这些线性驱动器电路使用功率运算放大器为电机创建负电阻驱动,以抵消电机串联电阻中的压降(参考文献 1)。图 1中的电路显示了使用 PWM 驱动器实现此类速度控制的方法,该驱动器可降低驱动电路中的功耗。
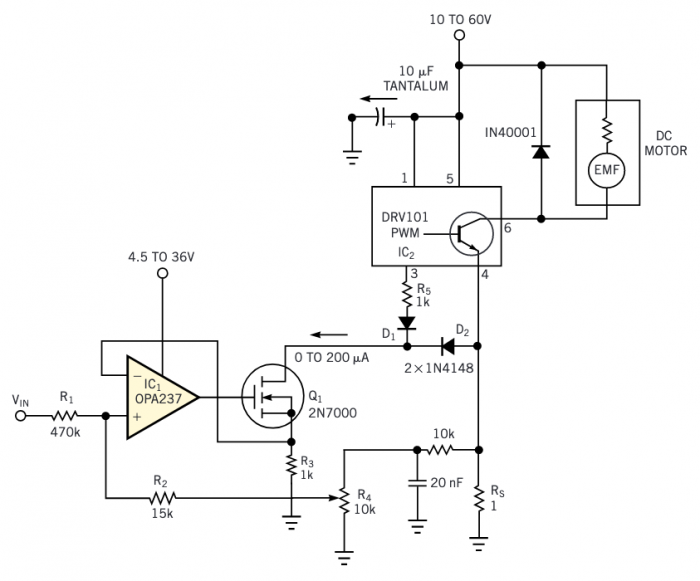
图 1源自电流检测
电阻器 RS 的正反馈增加了 PWM 控制器 IC 2的占空比驱动,以补偿负载变化时的电机速度。
控制电压 V IN设置速度,IC 1、Q 1和 R 3将 V IN转换为 0 至 200 ?A 电流。电流源控制引脚 3 处的 PWM 驱动器 IC 2的占空比。D 1、D 2和 R 5防止电路将控制输入拉得太低,从而导致控制环路反转。
电机电流流经 IC 2中的内部
开关晶体管,从公共
端子流出,并流经电流检测电阻器 R S。该电路对检测电阻两端的电压进行滤波和缩放,以通过 R 2向输入电路提供正反馈。通过适量的正反馈,电机负载的增加会增加电机电流,从而增加占空比驱动以保持恒定速度。 速度平衡方程为
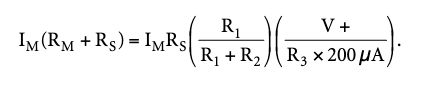
计算速度平衡的方程
该模型忽略了 IC 2开关电路中的损耗。根据电源电压,此类损耗可能会显着影响所需的反馈。与该方案的功率运算放大器实现不同,电源电压会影响该补偿 PWM 控制器。开关过程中损失的电压并不是真正的电阻性电压,并且很难建模。在实践中,您可以通过调整 R 4的正反馈控制来优化速度控制。通过适当的调整,电机速度可以在负载发生大幅变化时保持相对恒定。虽然不如真正的闭环转速计反馈控制器,但这种低成本技术比简单的电压驱动有了显着的改进。