虽然原始版本的目标是生产简单且实用的东西,但此 DI 的目的是看看我们可以在多大程度上匹配几行 DSP 代码的性能,无论需要多少硬件。初的版本仅使用一个双
运算放大器;这种方法将其扩充为两个四包。超过顶部:当然。具有启发性的乐趣:当然,至少对我们模拟人来说是这样。
基本原理与以前相同——强制电流通过
二极管,测量产生的电压(与输入的对数成正比),并捕获峰值——但实现方式不同。图 1显示了基本电路。
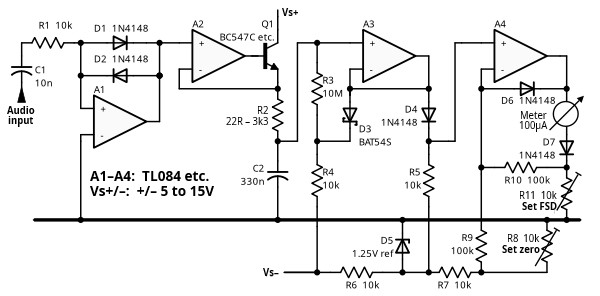
图 1我们取输入信号的对数;其峰值电平被C2捕获,缓慢线性放电;温度和电平校正应用于驱动仪表的电流源。
现在,要测量的音频输入通过 R1(一个 10k
固定电阻器而不是
热敏电阻)施加。热敏电阻通过缩放(线性)输入来补偿二极管的温度系数;使用固定电阻器,我们稍后将在电路中对(记录的)信号应用偏移,以达到相同的结果。A1 的输出是输入的对数压缩版本。目前,我们只需要它的正峰值。 A2 和 Q1 构成一个简单的峰值检测器。只要 A1.OUT 大于 C2 上的电压,A2/Q1 就会将电流转入 C2,直到电压匹配。使用
晶体管而不是二极管大大提高了速度;如图所示,当 R2 = 22R 时,它将捕获 20 kHz 的单个半周期,如图2所示,这比 PPM 规范要求的速度要快得多。(为了获得更慢、更真实的响应,请增加 R2。1k5 的响应时间约为 5 毫秒,终读数误差在 1 dB 以内。)这可能看起来是几个运算放大器缺少“适当的”峰值检测器,但它完成手头的工作:这是蒙泽德。(Muntz?他是谁?这会解释。)直接从 C2 取 A2.IN-(这似乎更常见)会导致过冲或减慢响应,具体取决于串联电阻的值。
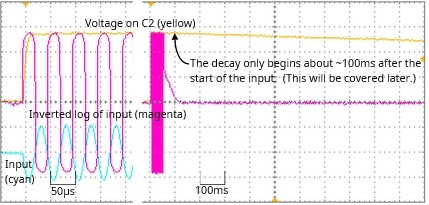
图2攻击或积分时间非常快;衰减或返回时间,慢得多,并且是线性的。
现在我们已经对 C2 进行了快速充电,我们需要缓慢地对其进行放电。A3 缓冲其电压,通过 D3/R4 自举 R3,在 1.7 秒内提供相当于 20 dB 的线性电压下降,这正是我们想要的,这更多是出于偶然,而不是设计。
现在我们将信号通过 D4,其温度系数约为 -2 mV/°C,补偿了 D1/2 的温度系数。它还使电平下降了约 600 mV 的 V F,需要恢复。D5 显示为通用 1.25 V 并联稳定器,其确切类型或值并不重要。(我使用了手边的 LM385;有了干净、稳定的负电源轨,就可以设计出来。)它提供了一个的源,不仅可以抵消 D4 的 V F,还可以抵消整个信号,以设置米针的零点。R8 允许将其从大约 -62 dBu (R8 = 10k) 调整到 +1 dBu (R8 = 0)。
A4 驱动仪表移动,缓冲来自 D4 的电压,通过 R9 应用偏移电压补偿。A4 将电流驱动通过仪表进入 R11,由此产生的电压通过 R10 反馈以闭合反馈环路。仪表串联了 D6 以防止摆动不足,D5 捕获 A4 上的负摆动。(遗憾的是我们不能对 A2 做同样的事情。)
校准很简单。在输入端施加输入电平,或在R1信号端施加负峰值对应的直流电压,调节R8使仪表上指示为零。现在应用电平(我选择 +10 dBu)并将 R11 设置为满量程偏转。必须先设置 R8,然后设置 R11。 温度稳定性好。根据 LTspice 的说法,温度系数在 +1 dBu 输入附近为零,在其他电平上也比较合理,在 15 至 35°C 的温度下,在 -50 dB 左右时读数误差在 1 dB 以内。令人沮丧的是,我只能通过在 R10 周围的网络中添加额外的电阻和热敏电阻来获得更好的补偿,这些值根据所需的跨度而不同:交互太多。额外的阶段可以解决这个问题,但是。。。图 3显示了仪表的模拟响应和实时响应。
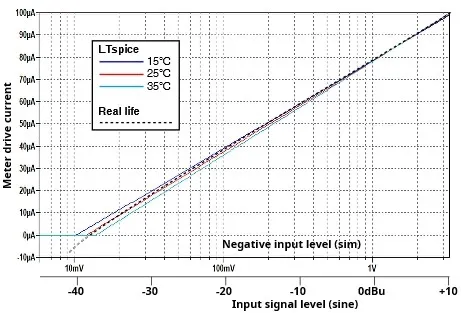
图 3设置 50 dB 跨度和 +10 dBu 读数时的模拟和测量响应,显示温度和运算放大器偏移的影响。
我们现在拥有了一款高性能仪表,具有接近数字的精度甚至度。但它仍然只是半波传感,并且还存在一些残留的错误。对于全波操作,我们可以将反相器 A5 等添加到 A1 的输出,以及第二个峰值检测级 A6 和 Q2(与 A2 和 Q1 有效并联),以添加正向的贡献输入:见图4。如果 A1 和 A5 具有零失调电压,或者如果将微调器产生的几毫伏施加到 A2.IN+ 和 A5.IN+,则可以省略 C3。现实世界(且廉价)运算放大器固有的输入偏移限制了跨度,因为它们会导致低电平的不准确,而要测量的信号与它们相当。 添加双极检测的另一种方法是在输入端使用全波整流器,但额外的运算放大器偏移使得这种方法在没有混乱的微调的情况下变得太不准确。
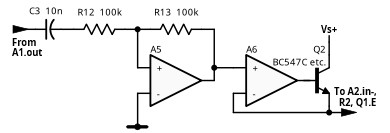
图 4可以添加额外的组件进行全波检测。 该电路的响应速度比仪表的移动速度还要快。C2 可能会因瞬变而几乎瞬时充电,但其电压将以指示的 11.8 dB/秒(或 1.7 秒内 20 dB)衰减。因此,如果仪表需要 85 毫秒响应,则该瞬态读数会低 1 dB。图 5显示了如何解决这个问题。

图 5添加的内容:“加电复位”和单稳态,可在峰值后提供约 100 毫秒的保持时间,以允许仪表移动赶上。
A7和A8形成单稳态,由C2电压急剧上升触发,并在A7.OUT处产生正脉冲。通过二极管将其连接到 R4(不再连接到 Vs-)可以解决该问题:当 A7.OUT 为低电平时,C2 将以正常方式放电,但当它为高电平时,C2 的放电路径实际上是开路。如图所示,对于 +/-6 V 电源轨,该保持时间约为 100 ms。调整 C5 或 R16 来改变这一点。结果如图2所示。
一步是上电复位,也如图 5 所示。(数字电路通常都有它们,那么我们为什么要被排除在外呢?)Q3 上的正轨急剧上升,这可能是几乎任何 n- MOSFET——持续几百毫秒,将 C2 钳位至地,同时电路稳定。如果没有这个,C2 可能会在加电时充电到高电平,需要很多秒才能恢复。
尽管显示了 100 ?A 的仪表移动,但 A4 可以轻松驱动几毫安。选择或调整 R11 以适应。