电路描述和功能 图 1 显示了 LT8714 作为 2 象限电源的电气原理图。该动力系统由 NMOS QN1、2、PMOS QP1、2、
电感器 L1、L2、耦合
电容器 CC 以及输入和输出
滤波器组成。电感器 L1 和 L2 是两个分立的非耦合电感器,这种方法可以降低转换器的成本。正确选择有源和无源元件需要了解每个象限中存在的电压应力和电流水平。为此,正输出的功能拓扑如图 2 所示。
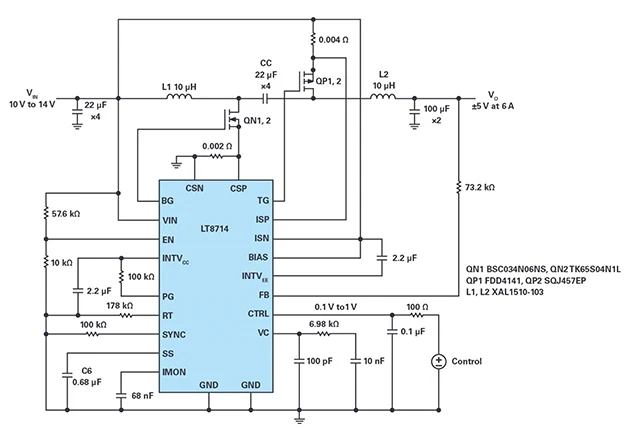
基于 LT8714 的电源的电气原理图,在 6 A 电流下以两个象限 VIN 12 V、VO ±5 V 运行。 图 1:基于 LT8714 的电源的电气原理图,该电源在两个象限 VIN 12 V、VO ±5 V(6 A 电流)下工作。
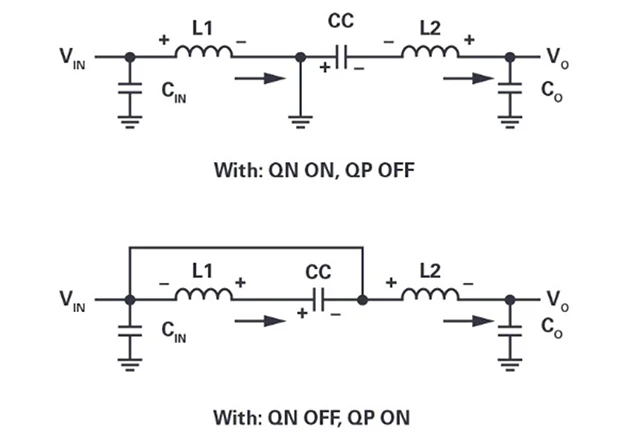
具有正输出的 2 象限操作拓扑。
图 2:具有正输出的 2 象限操作拓扑。 当伏秒平衡处于稳定状态时,占空比可由表达式得出:
D=VIN?VO2×VIN?VO
为了验证设计,对演示电路 DC2240A 进行了重新设计,以匹配图 1 中所示的原理图。输入电压标称值为 12 V,输出电压为 ±5 V,电流为 6 A。该设计的测量效率如图 3 所示。正输出超过负输出,这与理论计算结果相符。在负输出配置中,组件上的电压应力和电流要高得多,从而增加损耗并降低效率。 VIN 12V、VOUT +5V 和 –5V 以及 IO 为 6A 的转换器效率曲线。
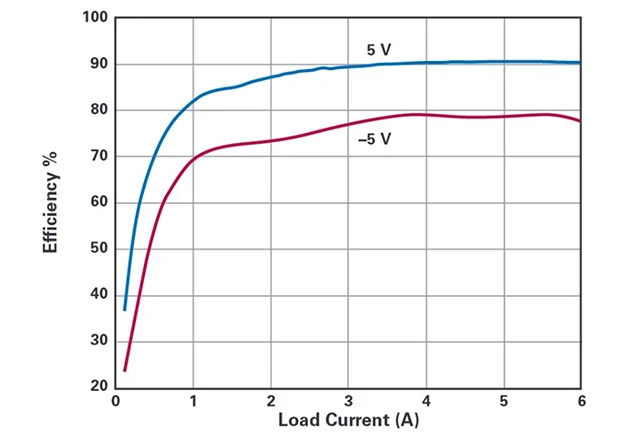
图 3:VIN 12V、VOUT +5V 和 –5V、 IO 为 6A 时的转换器效率曲线。 输出电压 VOUT 作为控制电压 VCTRL 函数的图表。 当 VCTRL 从 0.1V 变为 1V 时,VOUT 从 –5V 变为 +5V。
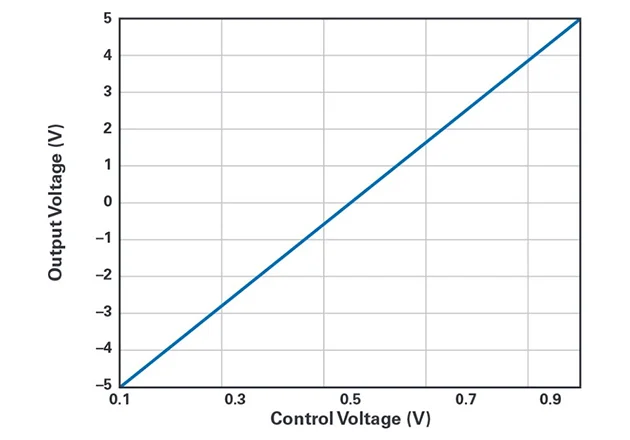
图 4:输出电压 VOUT 与控制电压 VCTRL 的关系图。当 VCTRL 从 0.1V 变为 1V 时,VOUT 从 –5V 变为 +5V。
图 4 显示了输出电压与控制电压 VCTRL 的出色线性关系。对于此配置,电路由 1 Ω
电阻器加载,控制电压在 0.1 V 至 1 V 范围内变化。使用两个 LTspice 模型,我们能够通过个模型中的电源良好指示来分析 LT8714 的性能并在第二个模型中使用非耦合电感器。