当今的许多 DAC 都需要具有差分输入的电路,该电路可以消除共模误差、减少 Δ-Σ 调制器产生的带外噪声并产生单端输出。本应用笔记概述了选择元件值所需的设计步骤。 当今的许多数字 DAC 都需要具有差分输入的电路,该电路可以消除共模误差、减少 Δ-Σ 调制器产生的带外噪声并产生单端输出。图 1 中的电路包括一个差分输入和一个两极模拟滤波器来实现这些设计要求。本应用笔记概述了选择元件值所需的设计步骤。
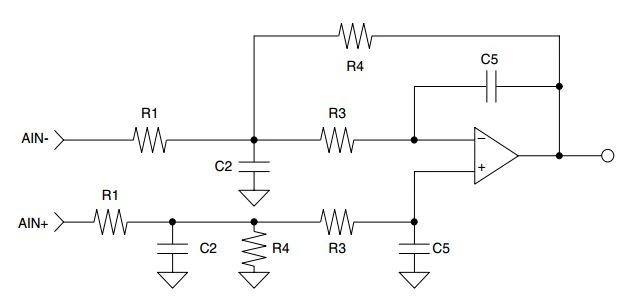
多反馈低通滤波器 请注意图 1 与图 2 所示的多反馈低通滤波器之间的相似之处。使用多反馈低通滤波器的设计方程可以轻松设计具有差分输入的 2 极低通滤波器。另外,请注意图 1 和图 3 之间的相似之处。差分输入功能是通过简单地复制滤波器设计中生成的元件值来实现的。
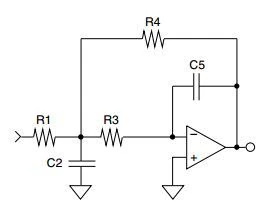
多反馈低通滤波器
设计步骤
步骤 1:确定所需的通带增益 [tex]H _{0}[/tex]。电路参数要求[tex]H_{0}[/tex]的大小大于或等于1。由于反相
运算放大器配置,[tex]H _{0}[/tex] 也为负。
步骤 2:确定输入阻抗。 步骤 3:为终设计选择所需的滤波器类型(巴特沃斯、贝塞尔等)以及另一个角频率 [tex]F _{C[/tex]。滤波器响应和转角频率决定通带相位和幅度响应。滤波器类型决定极点位置,从而决定 alpha 和 beta。表 1 列出了几种滤波器类型的标准化极点位置。

差分输入电路
步骤 4:为 C5 和 C2 选择方便的值。请注意,在步骤 5 中,必须选择 [tex]K[/tex] 和 [tex]H _{0}[/tex],使得 [tex]sqrt{zeta ^{2}-K(1-H _{0 })}[/tex] 是真实的。
步骤5:给定[tex]F _{C}[/tex],[tex]H _{0}[/tex],[tex]C _{2}[/tex],[tex]C _{5 }[/tex],alpha 和 beta,使用以下方程计算 R1、R2 和 R3:
[tex]zeta = frac{alpha }{sqrt {alpha ^{2}+beta ^{2}}}[/tex]
[tex]omega _{0} = 2pi F _{c} {sqrt {alpha ^{2}+beta ^{2}}}[/tex]
[tex]K=frac{C _{5}}{C _{2}}[/tex]
[tex]R _{1}=frac{R _{4}}{(-H _{0})}[/tex]
[tex]R _{3}=frac{1}{omega _{0}C _{2}[zeta pm {sqrt{zeta ^{2}-K(1- H _{0})}}]} [/特克斯]
[tex]R _{4} = frac{zeta pm {sqrt {zeta _{2}-K(1-H _{0})}}}{omega _{0}cdot C _{5}}[/特克斯]
步骤 6:检查
电阻器和
电容器值。希望保持电容器值足够大以化杂散电容的影响。可能需要调整步骤 4 中选择的电容器值才能实现此要求。还要验证 R1 是否大于所需的输入阻抗。
步骤7:步骤5中计算出的电阻值一般不是标准值。选择接近计算值的标准值。这不会对滤波器特性造成很大的变化,因为
金属膜电阻器的增量约为 2.5%,这允许在计算值附近选择组件。但是,建议使用步骤 5 中的方程,使用选定的值来计算实际的滤波器参数。
步骤 8:从单端电路到差分电路的转换需要复制同相输入中的 R1、C2、R3、R4 和 C5 的值,如图 1 所示。