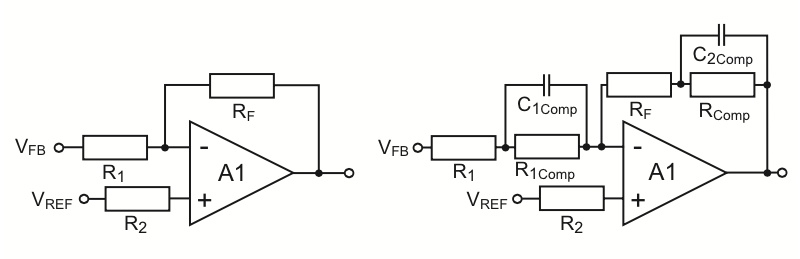
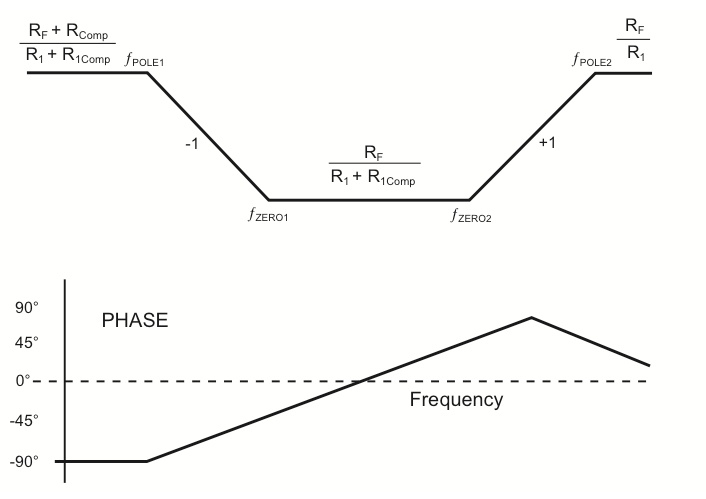
可以选择补偿元件值,以便在临界交叉频率处相位反转并增加相位裕度,从而提高稳定性。这使得输出滤波器的阻尼较小,从而加速 DC/DC 转换
 反馈环路补偿_2.png
反馈环路补偿_2.png
右半平面不稳定性
在通过二极管以连续电流驱动输出电感器的拓扑中,例如升压、降压/升压、反激和正激转换器,二极管的导通时间会增加反馈环路的延迟。如果负载突然增加,则必须暂时增加占空比以将更多能量转移到电感器中。然而,高占空比会导致二极管导通的时间 (tOFF) 较短,因此 tOFF 期间的平均二极管电流实际上会减少(右图 3)。当输出电流通过二极管提供时,输出电流也会减小。这种情况一直持续到平均电感电流缓慢上升且二极管电流达到其正确值为止。
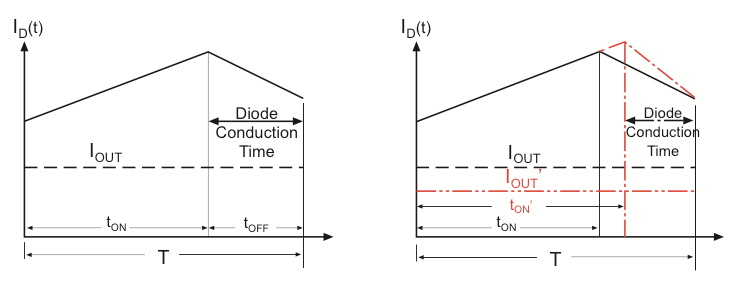 这种现象(二极管电流必须先减小然后才能增大)称为右半平面 (RHP) 不稳定性,因为输出电流暂时与占空比异相 180。例如,在简单的升压转换器中,根据以下公式出现临时附加零:
这种现象(二极管电流必须先减小然后才能增大)称为右半平面 (RHP) 不稳定性,因为输出电流暂时与占空比异相 180。例如,在简单的升压转换器中,根据以下公式出现临时附加零:
次谐波不稳定问题的解决方案称为斜率补偿。将人工斜坡波形(通常源自电感器电流的斜率或有时直接源自定时电容器电压)添加到反馈电压,以避免 PWM 比较器的错误触发或重新触发。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。