本文介绍了模拟和数字反馈系统中的环路稳定性分析。它提出了通过实验并使用拉普拉斯变换来寻找模拟环路稳定性,以及使用双线性变换来寻找数字环路稳定性。
本文介绍了模拟和数字反馈系统中的环路稳定性分析。它提出了通过实验并使用拉普拉斯变换来寻找模拟环路稳定性,以及使用双线性变换来寻找数字环路稳定性。
通过实验寻找模拟环路稳定性
可以使用波特图装置通过实验确定反馈环路稳定性。正弦波发生器可与音频
变压器一起使用,将干扰信号注入控制环路。正弦波的频率逐渐上升,直到输出上的干扰与干扰信号一样大。增益为 1,因此干扰频率必须为 fC,即反馈环路的转角频率。干扰信号和输出之间的相位差就是相位裕度。通过进一步增加频率直到相位差为-180°,可以找到增益裕度。
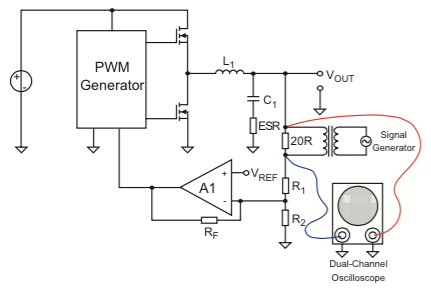
用于实验导出波特图的设置
使用拉普拉斯变换查找模拟环路稳定性
实验方法的另一种方法是用数学方法导出极点和零点。为此,我们需要知道转换器的传递函数。
傅立叶变换 (FT) 是 LT 的一种特殊形式。傅里叶确定任何周期信号都是各种频率、相位和幅度的正弦信号之和(傅里叶级数)。变换从时域转移到频域(反之亦然)。对周期信号进行傅里叶变换的结果是等效的傅里叶级数或频谱。图 2 以图形方式显示了方波的前六个谐波。
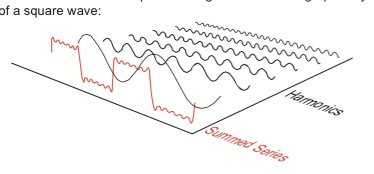
方波傅立叶级数的图形表示
积分函数从负无穷到正无穷的傅里叶变换可以写为:
编码:base64,Rihcb21lZ2EpPVxpbnRfey1caW5mdHkgfV57XGluZnR5IH1mKHQpZV4gey1qXG9tZWdhIHR9XGhzcGFjZXsxbW19ZHQ=
使用 LT,可以对反馈环路进行数学模拟并在 s 平面中生成零极点图。纵轴是虚轴,横轴是实轴。虚轴向上或向下移动得越高,振荡发生的速度就越快。在负实轴上走得越远,衰减越快,在正实轴上走得越远,增长越快。
使用双线性变换求数字环路稳定性
如果使用数字信号处理器来生成反馈环路补偿,则可以使用进一步的变换从拉普拉斯变换中导出数字环路的稳定性,以校正采样率。
由于数字系统的输入信号不再是时间连续的,因此需要使用双线性变换(Tustin 方法)将 s 平面值变换为 z 平面离散时间值。
该映射的结果是 z 平面的稳定区域变成半径 = 1 的圆(单位圆)。
数字补偿首先假设DSP的采样频率远大于系统交叉频率,以便任何模拟都是准确的。那么寻找补偿值有两种常见的方法:重新设计和直接设计。通过数字重新设计,建立了
开关变换器的线性模型,并在s域中传统地模拟了反馈环路补偿。将模拟补偿的结果映射到z域以完成数字补偿设计。对于直接设计方法,对开关功率转换器的离散模型进行整体仿真,并直接在 z 域中计算补偿设计。这需要使用 SpiceTM 或 MatlabTM 等程序对模拟部件进行准确的模型。
正是这种缺乏妥协以及在快速瞬态响应和稳定输出之间快速切换的能力,使得数字反馈环路如此有吸引力。随着微控制器成本持续下降,越来越多的 DC/DC 转换器将转向全数字或混合反馈环路控制器。
数字反馈环路

基于微控制器的 DC/DC 转换器
上面的电路显示了一个简化的基于微控制器的 DC/DC 转换器。所有时序均受数字控制 - 全桥功率级和输出同步整流。
该微控制器集成了板载
运算放大器元件。这意味着感测输入可以直接连接到微控制器。由于微控制器具有有关输入电压、输出电压和输出电流的信息,因此无需外部电路来监控短路或过载情况。输入电压监控允许受控启动和具有自适应迟滞的可编程欠压锁定。第四个运算
放大器输入用于监视 DC/DC 转换器内或远程负载处的过热状况。过热状况的后果可根据应用中所需的性能进行编程,例如,关断关闭和闭锁,冷却或功率限制后关闭和自动重启,以减少散热。
外部数据连接允许实时更新操作条件或选择各种预编程的性能选项。此外,双向通信总线允许故障和状态更新。