本系列文章中讨论的第五个控制器是 PID+:使用命令过滤器修改的 PID 控制器(如下图 6-24)。与 PI+ 一样,PID+ 的目标是允许更高的积分增益以改善直流刚度。同样,输入滤波器消除了由高积分增益引起的峰值;与 PI+ 一样,命令响应会随着刚度的提高而受到影响。
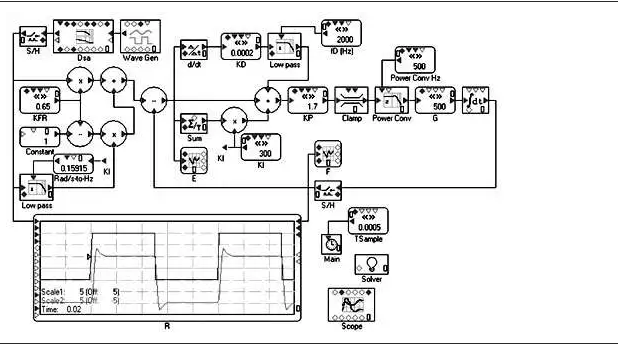
图6-24。实验 6E,PID+ 控制器 调节 PID+ 控制器与调节 PID 控制器相同,只是必须在调节积分增益之前选择 KFR 值(类似于 PI+)。其流程如下图6-25所示。
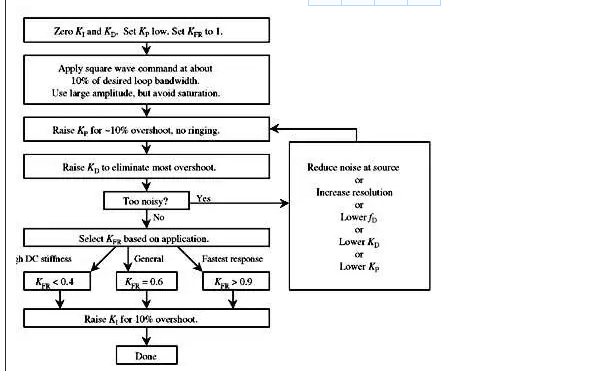
图6-25。调整 PID+ 控制器。 上面图6-25的调整过程的结果如图6-24和下面的图6-26和图6-27 所示。积分增益从 PID 控制器中的 120 增加到 300。 闭环波特图显示带宽从 PID 控制器的 359 Hz 降至 282 Hz。然而,PID+控制器只有140°的相位滞后,优于闭环PID控制器的170°相位滞后。
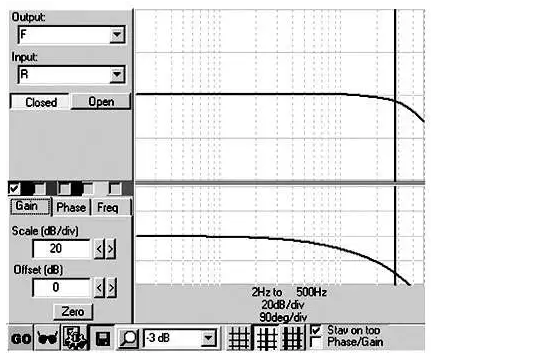
图6-26。PID+ 控制器的闭环波特图(282Hz 带宽,0.4dB 峰值)。 比较 PID+ 和 PI+ 控制器,D 增益的引入使 PID+ 控制器具有更高的带宽(282 Hz 与 180 Hz 相比)和类似的 DC 刚度,如积分增益 (300) 所示。 如下图 6-27所示,PID+控制器的 GM 与 PID 控制器相似,但 PM 为 45°,比 PID 控制器小 10°。这是预料之中的;与 PI+ 控制器一样,命令过滤器允许控制器以较低的 PM 工作。
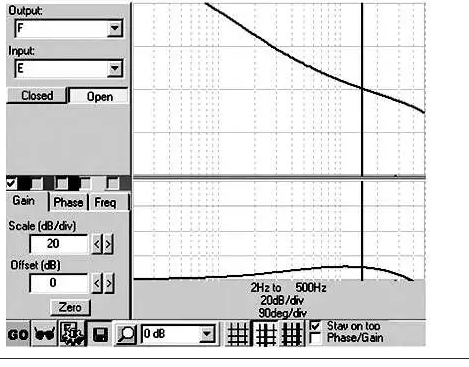
图6-27。PID+ 控制器的开环波特图(45° PM,7.9 dB GM)。 PD 控制 本系列介绍的第六个控制器是 PD 控制器。这里,P 控制器增加了 D 项,以允许更高的比例增益。控制器如下图6-28所示。它与 I 增益为零的 PID 控制器相同。
图6-28。实验 6F,PD 控制器。 调节 PD 控制器(如下图 6-29)与调节 PID 控制器相同,但假设 KI 为零。噪声的影响与 PID 控制器所经历的影响相同。 这允许更高的带宽(PD 控制器为 353 Hz,而 P 控制器为 186 Hz),尽管该带宽下的相位滞后要高得多(PD 控制器为 162°,而 P 控制器为 110°)。与 PID 控制器一样,PD 控制器速度很快,但更容易出现稳定性问题。 此外,GM 更小(8.8 dB,比 Pcontroller 低 3 dB)。PD 控制器在需要快响应的情况下非常有用。 选择控制器 本系列六个控制器的调整结果列于下表 6-3。每个控制器都有其优点和缺点。简单的 P 控制器提供适合许多应用的性能。 I 项的引入提供了直流刚度,但减少了 PM。PI+ 和 PID+ 中的命令滤波器允许更高的直流刚度,但减少了带宽。 D 项提供了更高的响应能力,但会侵蚀增益裕度并增加相移,如果该环路要在外环路中闭合,则这是一个缺点。 图表提供了选择控制器的过程。首先确定应用是否需要D增益;如果不是,请避免使用它,因为它会增加复杂性,增加噪声敏感性,并窃取增益裕度。 接下来,确保应用程序可以支持D增益;有噪声的系统可能无法在差分增益下正常工作。之后,检查应用程序所需的直流刚度。 如果不需要,请避免积分增益。如果需要,请使用标准形式(PI 或 PID);如果需要直流刚度,请使用 PI+ 或 PID+ 控制添加输入滤波器。