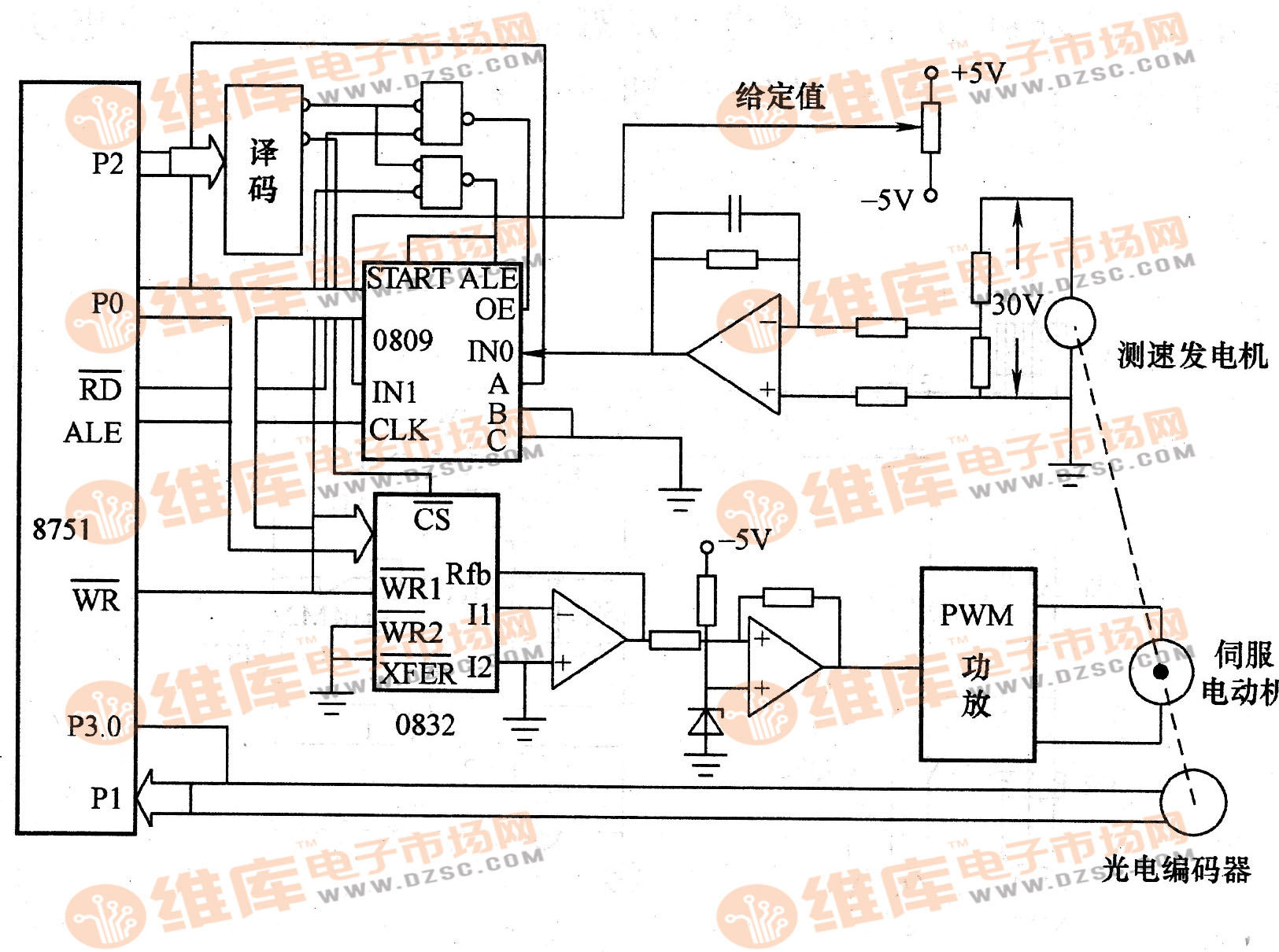
该电路中伺服电动机的控制电压由单片机输出后送入0832进行D/A转换,转换后的模拟量经放大和电平转换送入PWM功放电路,产生的PWM波驱动电动机旋转。
采用测速发电机对电动机的转速进行测量,经放大后送入0809进行A/D转换,转换后送入单片机;电动机的转角位移由9位式光电编码器直接送人8751的端口,进行位置反馈。控制系统中的速度调节器和位置调节器将由8751的应用程序来完成。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。