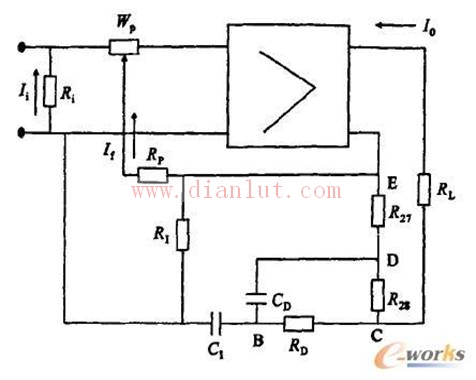
PID控制系统输出的电流经过运算放大及驱动环节得到所需的补偿电流磁势I2eWe,运算放大环节在自动控制系统中属于比例控制。比例控制的缺点是存在余差,当对控制质量有更高要求时,就需要在比例控制基础上,再加上能消除余差的积分控制作用。微分控制系统中即使偏差很小,只要出现变化趋势,就可马上进行控制,有超前控制的特点,因此本文在差值电流补偿回路中采用PID控制器。PID反馈电路如图所示,它既能快速进行控制,又能消除余差,具有较好的控制性能。
PID运算电路的工作过程如下:当输入信号Ii有一阶跃变化时,一开始CD、C1,相当于短路,输入信号突跳至微分作用值。继而随着对CD的充电,负反馈电压逐渐升高,输出电流I0逐渐衰减下来。与此同时,CI也被充电,随着CI两端电压逐渐增加,负反馈作用逐渐减小,输出电流I0又慢慢上升。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。