交通灯系统控制器设计要求
路口交通灯控制系统与其他控制系统一样,划分为控制器和受控电路两部分。控制器使整个系统按设定工作方式交替指挥车辆及行人通行,并接收受控部分反馈信号,决定其状态转换方向及输出信号,控制整个系统工作过程。按照路口交通运行实际情况,在本系统中,设定系统工作情况如下。
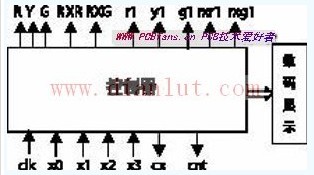
路口交通灯控制系统东西路有交通灯R(红)、Y(黄)、G(绿);东西人行安全通道灯:RXR(红)、RXG(绿)。南北路有交通灯:r1(红)、y1(黄)、g1(绿);南北人行安全通道灯:rxr1(红)、rxg1(绿),所有灯均为高电平点亮。设置15s通行时间和5s转换时间变模定时电路,由预置输入整数cnt决定是模15还是模5,输入逻辑cx是用来决定计数到4时清零还是到14时清零。Clk是外部提供基准秒脉冲信号。x0、x1、x2、x3是由控制器输出表示计数时间四位二进制数。上图是该系统控制器符号框图。
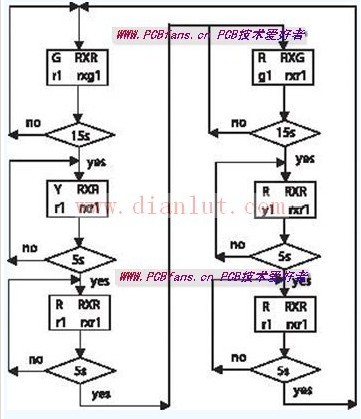
根据系统设计要求,得到控制器ASM图,如图中所示。在这里,所有输入信号均为高电平有效。该ASM图反映了交通灯系统不同状态转换过程及持续时间。
控制器VHDL程序设计
根据所分析系统ASM图,结合系统设计要求,用VHDL语言对各个模块进行编程,形成顶层文件,在MAX PLUSⅡ环境下进行编译与仿真,检查所编程序是否运行正确。如果出现错误,需要进行修改,直到完全通过为止。需要说明是,在进行程序编译时,要先从底层程序开始,所有底层程序都正确后,才能开始顶层程序编译。这是因为顶层程序是对底层程序概括,它是把底层程序各个模块连接起来,就相当于把每个模块功能汇聚到一起,实现整个系统控制功能,所以底层程序正确与否,关系到顶层程序运行结果。
在控制器程序设计中,在定义结构体时,有两种程序设计方法均可以通过编译及仿真,但在进行时序分析时结果却不同。
在这种设计方法中,多定义了一个信号变量,从而使得程序能按设定状态14,13,12…进行转换。通过这个实例,可以看出EDA技术作为电子设计工具功能修改及调试方便快捷,即不需要硬件电路支持就可以找到问题所在并进行修改,体现了它优越性。
硬件电路实现
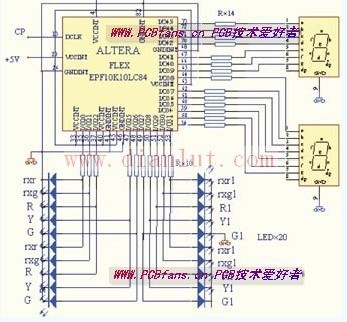
根据交通灯系统控制要求,下图所示为本系统硬件电路图。该电路包含了1个CPLD芯片,2个七段LED数码显示器,20个分别表示各个方向上红、黄、绿灯,以及相应限流电阻。这个电路与其他控制方法相比,所用器件可以说是比较简单经济。经过实验,实现了预定交通灯系统控制功能。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。