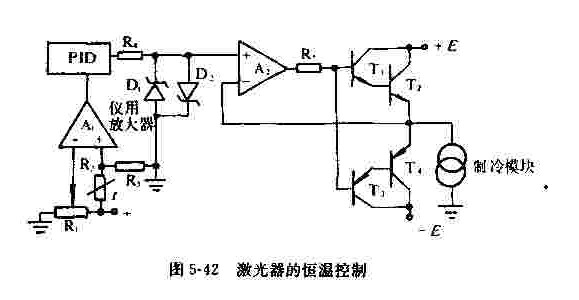
图5-42表示,一种是用热泵的恒温控制电路。它由热敏电阻桥,仪用放大器,模拟PID和热泵组成。
图中,电位器R1,热敏电阻R2和电阻R3构成电桥。热敏电阻R2应紧靠激光器,以检测激光器的温度变化。当R2的阻值发生变化时,电桥失去平衡,产生的电压差值由仪用放大器A1进行放大。放大了的误差信号再送到PID控制级,这的输出通过放大器A2和双极性输出级而影响供给热泵的电压值。在对温度进行控制并且要求以短的时间达到规定的温度时,常常采用PID控制法。前面已经指出,只在普通比例控制电路上对误差信号进行积分的回路,存在响应速度变慢等问题。
晶体管T1,T2和T3,T4构成双极性输出级,向制冷模块供电。稳压二极管D1.D2的作用是,把加到模块两端的电压钳位,防止它流过过大的电流。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。