CAN 总线技术定义:CAN 总线技术全称为 “控制器局域网总线技术 ( Controller Area Network - BUS) ”,其是控制单元通过网络交换数据,在汽车上用于车上各种传感器数据的传递。可以将 CAN 数据总线形象地比作公共汽车,公共汽车能运输大量乘客,而 CAN 数据总线包含大量的数据信息。

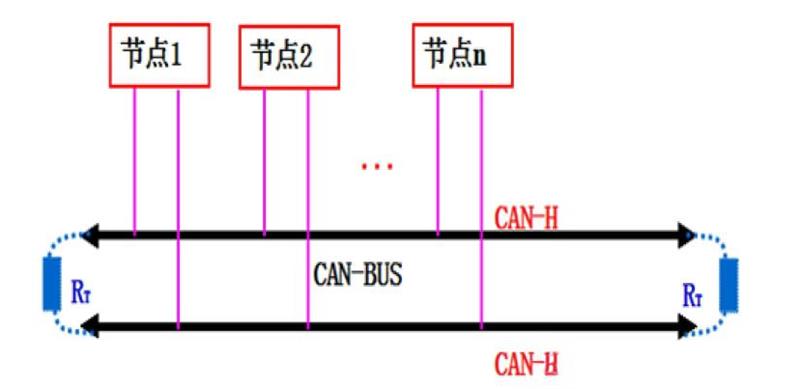
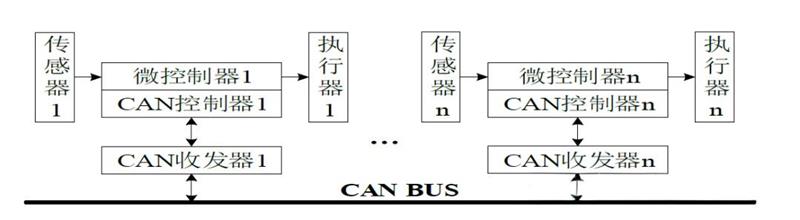
CAN 网络组成:CAN 总线主要由若干个节点、两条数据传输线(CAN - H 和 CAN - L)及终端电阻组成。终端电阻的重要作用是防止信号在传输线终端产生反射波,避免干扰正常传输的数据。CAN 总线上的每个节点独立完成网络数据交换和测控任务,每个 CAN 总线系统中多可以连接 110 个节点。CAN 节点主要由微控制器、CAN 控制器、CAN 收发器组成,目前汽车上多采用内部集成 CAN 控制器的微控制器,并且控制器和收发器都集成在控制单元内部。
CAN 网络分类:由于 CAN 总线在汽车上的具体应用和数据传输速率不同,可分为高速 CAN 和低速 CAN。高速 CAN 总线数据传输速率为 500 Kbit/s,用于将驱动系统中的控制单元联成网络;低速 CAN 总线数据传输速率为 100 Kbit/s,用于将舒适系统中的控制单元联成网络。由于各种数据总线和网络的传输速率、信号表示、通信协议等不同,不同类型的总线之间无法直接耦合连接并进行数据交换,必须经过一个叫做网关的控制器进行转换。网关能使不同总线和网络的信息共享,避免协议冲突,实现无差错的数据传输。
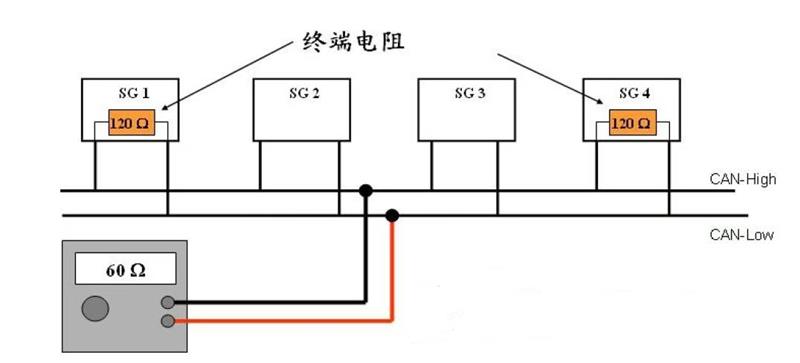
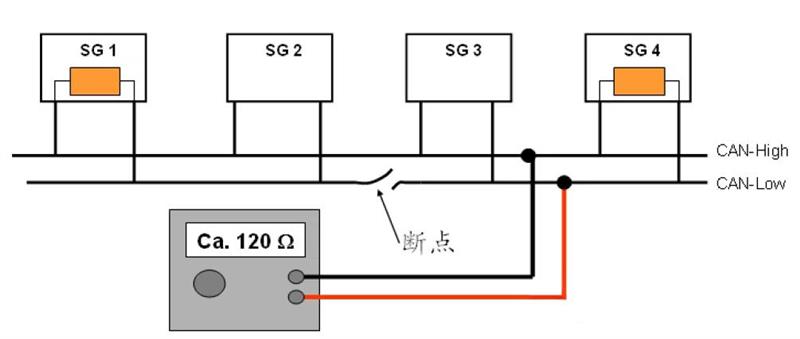
电阻测量 —— 测量量终端电阻值:电阻测量过程中应注意,先断开车辆蓄电池的接线,大约等待 3 min,直到系统中所有的电容器放完电后再测量,因为控制单元内部电路的电阻是变化的;同时,舒适 / 信息总线无法测量终端电阻。

电压的测量:测量 CAN - L(或 CAN - H)的对地电压。高速 CAN 的 CAN - L 对地电压大约为 2.4 V,CAN - H 对地电压大约为 2.6 V;低速 CAN 的 CAN - L 对地电压大约为 4.8 V,CAN - H 对地电压大约为 0.2 V。这些接近的值根据总线负载可能有大约 100 mV 的偏差。
波形测量:正常波形 CAN - High 与 CAN - Low 的波形相同,极性相反,且电压值相等。使用示波器可以轻松判断总线故障,正常波形如图所示。免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。