典型的永磁步进电机有两个绕组。如果系统使用双极驱动器,则通过两个绕组施加特定的正向和反向电流模式来实现旋转。因此,双极驱动需要每个绕组一个 H 桥。单极驱动器使用四个独立的驱动器,这些驱动器不需要能够在两个方向上施加电流:绕组中心作为单独的电机连接提供,每个驱动器提供从绕组中心到绕组末端的电流。与每个驱动器相关的电流始终沿同一方向流动。
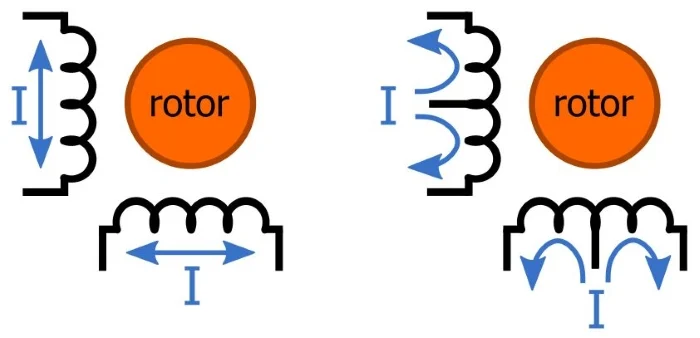
双极驱动(左侧)和单极驱动(右侧)。单极系统中的电流方向表明每个绕组的中心连接到电机的
电源电压。
用于步进控制的通用 IC
首先要记住的是,用于基本电机控制功能(甚至只是基本驱动器功能)的 IC 可以与步进电机一起使用。您不需要专门贴有步进控制器件标签或作为步进控制器件销售的 IC。如果您使用的是双极驱动器,则每个步进电机需要两个 H 桥;如果您采用单极方法,则一个电机需要四个驱动器,但每个驱动器可以是一个
晶体管,因为您所做的只是打开和关闭电流,而不是改变其方向。
“通用 IC”类别中的器件示例是德州仪器 (TI) 的 DRV8803。该器件被描述为“适用于任何低侧开关应用的驱动器解决方案”。
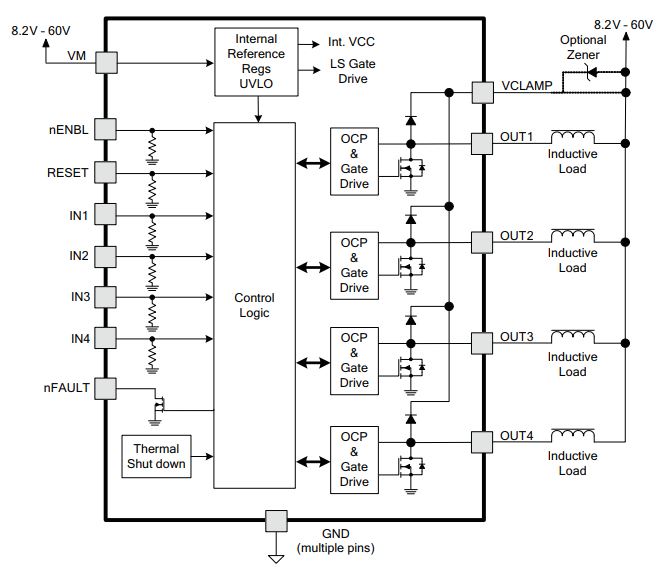
图表取自 DRV8803 数据表。
使用这样的设备,步进电机绕组的中心连接到电源电压,并通过打开低侧晶体管为绕组通电,以便允许电流从电源流过绕组的一半,通过晶体管接地。
如果您已经拥有或有使用合适驱动器的经验,那么通用 IC 方法很方便——您可以通过重复使用旧器件来节省几美元,或者通过将已知且经过验证的器件合并到步进控制器原理图中来节省时间(并降低设计错误的可能性)。缺点是更复杂的 IC 可以提供增强功能并确保更简单的设计任务,这就是为什么我更喜欢具有附加功能的步进驱动器。
功能齐全的步进驱动器
高度集成的步进电机控制器可以大大减少更高性能步进电机应用所涉及的设计工作量。我想到的个有益功能是自动生成步进模式,即能够将简单的电机控制输入信号转换为所需的步进模式。
让我们以 STMicroelectronics 的 L6208 为例。
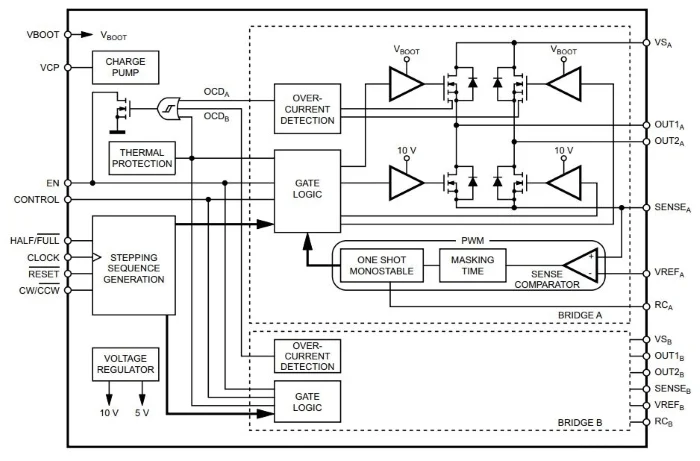
图表取自 L6208 数据表。
L6208 没有直接控制施加到电机绕组的电流的逻辑输入,而是具有一个在半步和全步之间进行选择的引脚,
设置旋转方向的销钉,
以及一个 “clock” input pin,使内部 Motor Control 状态机响应 rising edge 前进一步。
这个接口比应用于连接到绕组的晶体管的实际开/关序列要直观得多(下面给出了一个例子)。
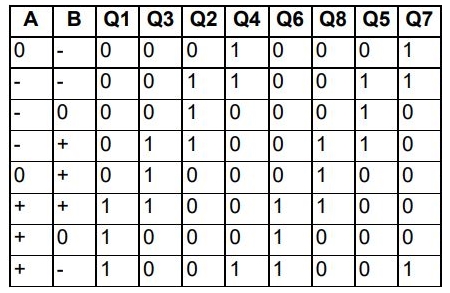
这是双极步进电机控制的全步模式。“A” 和 “B” 指的是两个绕组,“Q” 列表示控制绕组电流的晶体管的状态。表摘自 Silicon Labs 发布的本应用说明。
微步骤
顾名思义,微步进会导致步进电机执行明显小于一步的旋转。这可能是一个步骤的 1/4 或一个步骤的 1/256,或者介于两者之间。微步进可实现更高分辨率的电机定位,并且还可以实现更平稳的旋转。在某些应用中,微步进是完全不必要的。但是,如果您的系统可能受益于极其的定位、更平滑的旋转或更低的机械噪声,则应考虑具有微步进功能的驱动器 IC。
Trinamic 的 TMC2202 是微步进步进电机控制器的一个例子。
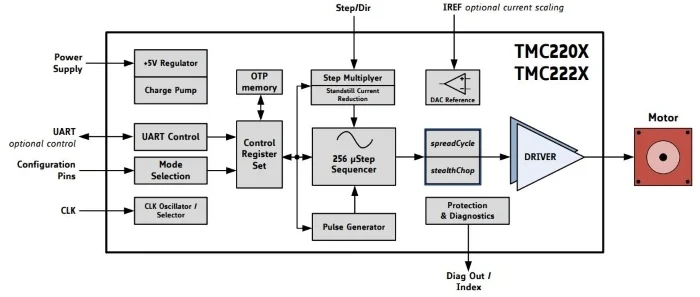
图表取自 TMC2202 数据表。