伺服电机是一种用于控制位置、速度和加速度的电机,广泛应用于机器人、自动化设备和精密机械中。以下是伺服电机的分类、特点、接线图以及机器人的工作原理的详细信息:
伺服电机的分类
按控制方式分类
位置控制伺服电机: 主要用于控制电机的位置,例如在机器人关节中。
速度控制伺服电机: 用于控制电机的转速,例如在输送带系统中。
扭矩控制伺服电机: 控制电机输出的扭矩,用于要求负载控制的场合。
按电机类型分类
直流伺服电机(DC Servo Motor): 通常由直流电机和位置传感器(如编码器)组成,适合低到中等功率应用。
交流伺服电机(AC Servo Motor): 通常具有更高的功率和效率,适用于高精度和高负载应用。包括异步电机和同步电机。
同步伺服电机: 电机转子与定子磁场同步,具有更高的效率和更的控制。
异步伺服电机: 也称为感应伺服电机,通常成本较低,但效率和精度不如同步伺服电机。
按反馈类型分类
有编码器伺服电机: 通过编码器提供的反馈信息,常用于需要高精度控制的应用。
无编码器伺服电机: 通常较便宜,适用于精度要求不高的应用。
伺服电机的特点
高精度: 通过反馈系统(如编码器或解析器)实现的位置、速度和扭矩控制。
高响应性: 快速响应控制信号,适合动态应用。
高效率: 尤其是交流伺服电机,能量转化效率高。
良好的控制性: 可以进行精细的控制操作,适合复杂的运动控制任务。
高负载能力: 能够处理高负载应用,尤其是高功率的交流伺服电机。
伺服电机的接线图
伺服电机的接线图通常包括以下几个主要部分:
电源线: 提供电机工作所需的电压和电流。
控制线: 用于传输控制信号,如PWM信号(脉宽调制),模拟电压,或数字信号。
反馈线: 连接到编码器或解析器,提供位置、速度或扭矩反馈。
地线: 电机和控制系统的共同接地,确保系统稳定性。
以下是一个典型的伺服电机接线图(以交流伺服电机为例):
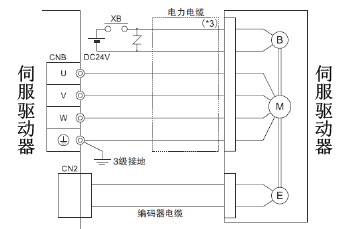
电源线: 连接到伺服电机的电源端子。
控制线: 连接到伺服驱动器的控制输入端。
反馈线: 连接到伺服驱动器的反馈输入端。
地线: 连接到伺服系统的地线端子。
机器人的工作原理
机器人通常由以下几个主要部分组成:
伺服电机: 提供机械运动,控制机器人关节的角度和位置。
控制器: 机器人大脑,处理输入信号、执行控制算法、生成控制指令。控制器接收来自传感器的数据,并向伺服电机发出控制命令。
传感器: 用于检测机器人周围环境和自身状态。常见传感器包括位置传感器(编码器)、力传感器、视觉传感器等。
执行机构: 根据伺服电机的指令执行具体的操作,例如机械手臂的移动或抓取。
电源系统: 提供机器人各部分所需的电力。
工作流程:
数据采集: 传感器收集环境和机器人的状态信息,并将这些数据传输给控制器。
控制计算: 控制器根据传感器数据和预设的控制算法计算出需要执行的动作。
发出指令: 控制器生成指令,控制伺服电机的动作,调整机器人关节的位置或速度。
动作执行: 伺服电机接收到控制指令后,执行相应的动作,通过机械结构完成任务。