滞后和延误
之前,我引用了滞后的四个定义。我们当时讨论了其中两个,现在我们讨论另外两个:
“由于产生该效应的机制的变化而导致观察到的效应发生延迟”——《牛津
电子与电气工程词典》。
“由于摩擦等阻力而导致预期值的滞后效应”—— 《牛津化学工程词典》。
这里描述的延迟和滞后效应主要与所谓的速率相关滞后相关。我说“所谓的”是因为延迟响应可能就像正弦相位滞后一样简单。在我看来,这并不算是真正的滞后。
然而,该术语背后的逻辑如下:速率相关迟滞取决于输入信号的变化率(换句话说,频率)。速率相关滞后的影响在某些频率下会更加明显。
例如,低通
滤波器会导致相位滞后。如图 1 所示,该相位滞后并非在所有频率上都相等。相反,输入到输出相位延迟的幅度从零开始,并随着输入频率的增加而增加。因此,低通滤波器的相位滞后代表速率相关的滞后。

低通滤波器的正弦相位滞后。
图 1.低通滤波器的相位滞后。
我们在上一篇文章中主要讨论的与速率无关的迟滞会产生不受输入频率影响的效应。与速率无关的迟滞的一个示例是具有用于增加输入信号和减少输入信号的单独阈值的比较器。无论输入频率如何,这些单独的阈值都会影响输出行为。
协调迟滞理论中的延迟和系统历史
“延迟”定义与“系统历史”定义并不矛盾,因为我们可以将速率无关磁滞视为速率相关磁滞的更极端形式。让我们看一下图 2,它再现了上一篇文章中的数字磁滞图。
迟滞作为传递函数而不是曲线。
图 2. “数字”磁滞。
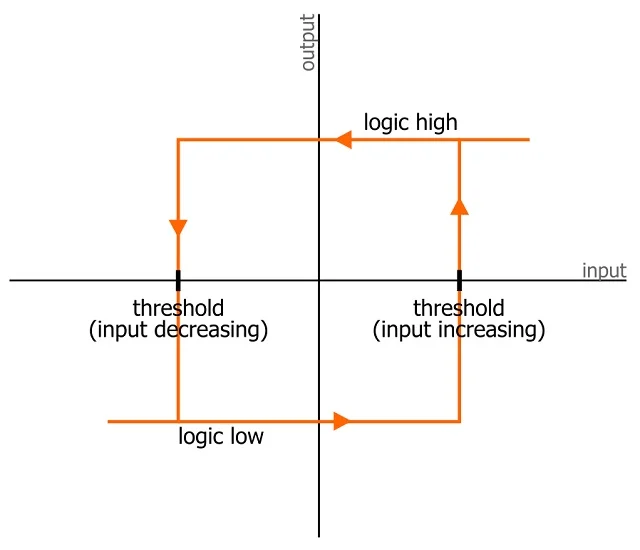
我们可以在这里看到,当增加的输入超过下限阈值时,输出不会改变状态。它也不会改变两个阈值之间的中点处的状态,我们期望阈值在没有滞后的情况下位于该中点。这种类型的滞后会产生延迟,但也会产生更为重要的非线性行为。
例如,假设我们正在使用由 5 V 供电的逻辑门,输入从 0 V 开始并逐渐增加。在没有迟滞的情况下,我们可能期望阈值为 2.5 V。但如果门设计有迟滞,则实际阈值可能为 2.25 V 和 2.75 V。在这种情况下,当输入达到2.5 V——必须达到更高的阈值,2.75 V。
这构成了对输入刺激的预期响应的延迟。然而,我们需要认识到,这不仅仅是一个延迟——如果输入永远不会达到较高的阈值,输出将永远不会转换。如果输入减少并且永远不会达到较低的阈值,输出同样永远不会转换。
磁滞和功耗
上述定义之一是指由“摩擦等阻力”引起的延迟。在我们结束之前我想对这个细节发表评论。
在机械系统中,摩擦是无意的功率耗散的一个无处不在的来源。电气系统中的磁滞也是导致能量浪费的“电阻”来源。例如,考虑驱动铁芯
变压器等磁性组件的交流信号。信号必须提供额外的能量来响应
磁性材料的固有磁滞现象。
更严重的滞后倾向需要更多的额外能量。材料磁滞图中两条曲线围成的面积对应于不需要的功耗量。
但实际上,这种功耗并不总是不必要的。我们看到的夹在电源或 USB
电缆周围的铁氧体环可以抑制高频噪声,因为铁氧体表现出很强的磁滞现象(图 3)。交流噪声信号与铁氧体材料之间的相互作用导致噪声能量以热量的形式耗散。
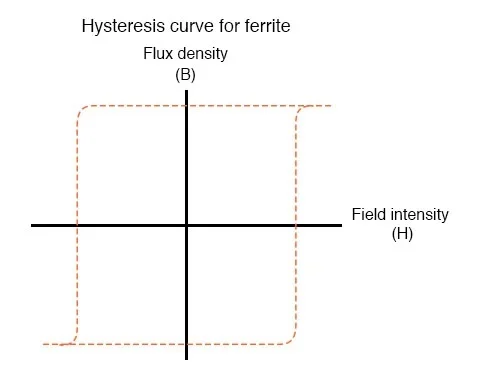
铁氧体的磁滞曲线。
图 3.铁氧体的磁滞曲线。