在上一篇文章中,我们将加速度计机械部分的传递函数推导为:
H(s)=x(s)a(s)=?1s2+bms+k米
通常定义以下参数以获得更简单形式的传递函数方程:ωn=√km
Q=mωnb
其中 ω n和 Q 分别表示 系统的固有频率和品质因数(也称为 Q 因数) 。使用这些参数,我们可以将传递函数方程重写为:
H(s)=x(s)a(s)=?1s2+ωnQs+ω2n
正如我们使用电路的传递函数来预测其对正弦输入的稳态响应一样,我们可以使用上述传递函数来确定响应于特定频率下的正弦加速度的验证质量位移。例如,如果外部加速度在 f 处呈正弦曲线,则由下式给出:
a(t)=sin(2π×fin×t)
验证质量位移将为:
x(t)=|H(2πfin)| sin(2π×fin×t+?)
其中 |H(2πf in )| 和 Φ 分别表示频率 f in处的传递函数的幅度和相位。请注意,这是系统的稳态响应。
每当系统状态改变时,系统也会表现出瞬态响应。例如,当我们首先将正弦输入施加到静止的系统或移除正弦加速度时,会观察到系统的瞬态响应。然而,如果我们应用正弦输入足够长的时间,瞬态响应就会消失,我们会观察到系统的稳态响应。当 ω n = 2π x 500 Hz 和四个不同的 Q 值(0.5、1、1.5、5)时,我们得到如图 1 所示的曲线。
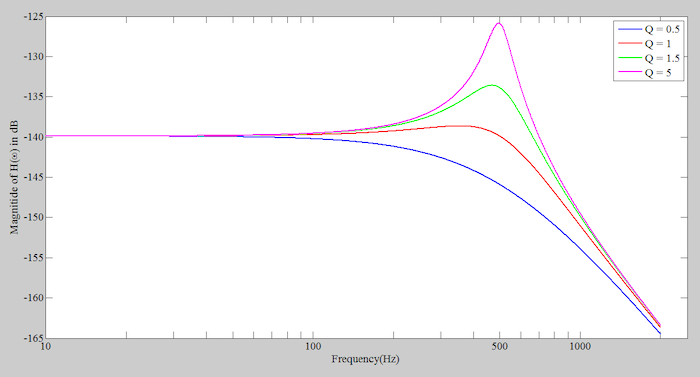
正如您所看到的,在非常低的频率下,传递函数的幅度几乎是恒定的。方程 1 给出了 |H(ω)| 的值 直流(或低频)加速度为:
| |H(f=0)|=1ωn
当我们接近系统固有频率 f = 500 Hz 时,传递函数的幅度会根据 Q 因子值而增加或减少。高于固有频率,响应幅度会减小,并且我们有一个类似于低通电路的滚降区域。典型 MEMS 加速度计中采用的质量-弹簧-阻尼系统在谐振频率附近呈现增益峰值,类似于图 1 中的粉色曲线。
剩下的问题是,我们可以在什么频率范围内使用该系统来测量加速度?atotal(t)=sin(2π×fin1×t)+sin(2π×fin2×t)
假设系统引起的相移可以忽略不计,我们有:
xtotal(t)=|H(2πfin1)|sin(2π×fin1×t)+|H(2πfin2)|sin(2π×fin2×t)
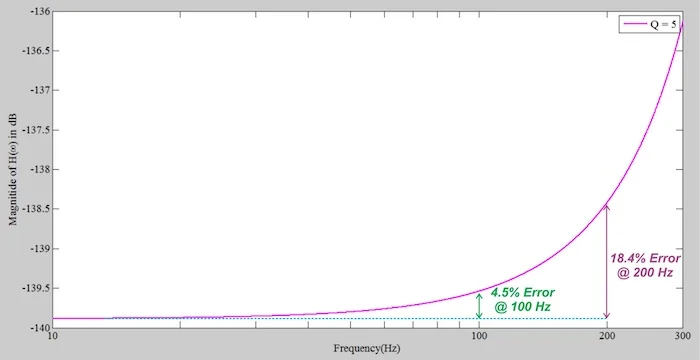
仅当系统响应对于所有感兴趣的频率分量都是恒定的时,总位移才与所施加的加速度成正比,即 |H(2πf in1 )| = |H(2πf in2 )|。因此,我们需要平坦的频率响应。实际上,即使在非常低的频率下,响应幅度也不是恒定的。图 2 显示了 ω n = 2π x 500 Hz 和 Q = 5情况下的传递函数曲线的放大版本。
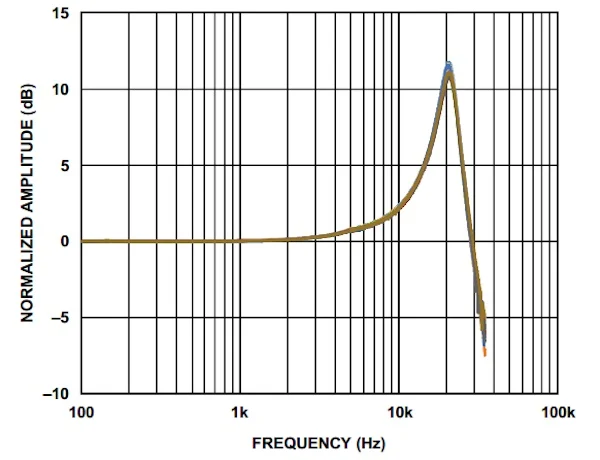
以下ADXL1001数据表摘录显示,加速度计的 5% 带宽为 4.7 kHz。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。