为了克服成本问题,每个 ECU 都配备了来自主 ECU 的附加 I/O,称为“IGNITION”。收到点火输入后,从属 ECU 将从睡眠状态唤醒。这种传统架构有其自身的局限性,例如,它需要额外的通信接口(如 LIN、CAN 或以太网)来传送电源模式(如睡眠、活动和其他状态信息)。这进一步增加了系统成本。
IGNITION 是一个单向信号,由主 ECU 发出,对于从 ECU,这只是一个输入。为了检测此点火输入,从 ECU 中的
微控制器必须启用唤醒源。即使 ECU 处于低功耗状态,它也会消耗一些功耗以使微控制器以及 DC-DC 控制器保持在睡眠状态。
在许多车辆架构中,CAN 或 LIN 接口用于通信以及唤醒目的(通过 CAN 唤醒),无需点火输入。然而,这比之前的情况消耗更多的睡眠电量。

图 1 传统的车辆架构,其中多个 ECU 组合在一起并由单个
保险丝供电,以节省设计成本。这导致在睡眠状态下控制电流受到限制。
建议的解决方案
在建议的架构中,IGNITION I/O 将替换为硬件唤醒 I/O (HW_WAKE)。图 2显示了所提出的具有硬件唤醒 I/O 的架构的基本框图。
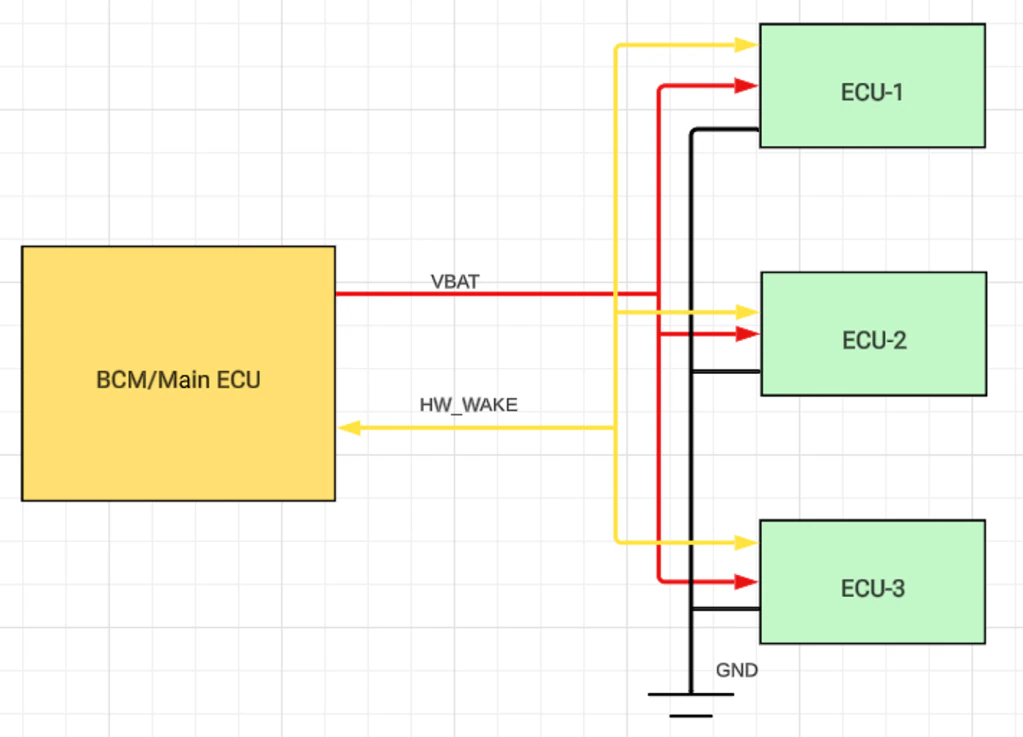
图 2使用硬件唤醒 I/O (HW_WAKE) 的建议架构。
硬件唤醒I/O的内部电路如图3所示。

图 3硬件唤醒双向电路,具有两个用于控制输出的
晶体管、一个用于读取相同 I/O 的电阻分压器以及用于反向保护的
二极管。
它由两个用于控制输出功能的晶体管Q1双封装(一个 NPN 和一个 PNP)以及一个用于接收或读取相同 I/O 的简单电阻分压器( R2、R3和R4 )组成。另外,还有二极管(D1、D2)用于反向保护。
这是一个双向 I/O,我们可以接收唤醒、重置和睡眠等信号,也可以发送反馈和错误状态等信号。HW_WAKE I/O 的电压电平跟随
电池电压,在建议的设计中控制电流为13.5 mA 。用户可以通过改变电阻R1来决定其电流。
该电路具有短路保护功能,不需要任何花哨的或协议收发器。HW_WAKE 信号可以连接“n”个 ECU。为了避免 I/O 污染,用户可以在置位“HW_WAKE_TX_FROM_MCU_GPIO”之前读取“HW_WAKE_RX_TO_MCU”I/O 状态。
HW_WAKE信号的优点
由于此 HW_WAKE 是双向 I/O,因此任何 ECU 都可以充当主机,这在需要多个唤醒源的情况下非常有用(例如,如果一个 ECU 唤醒并向所有其他 ECU 发送唤醒信号)。HW_WAKE I/O 的默认状态为打开 (0 V),仅在需要时才会置位 (VBAT)。通过采样、发送基于定时的信号,控制和状态信息都通过该单线接口进行传输。
在使用HW_WAKE I/O时,我们可以避免使用LIN或CAN协议介质,从而节省大量的设计和实现成本。用户可以对所有信号实施自己的计时。我们可以在睡眠状态下将ECU完全断电,这样我们就可以实现接近0mA的超低功耗。这可以通过将“HW_WAKE_RX_TO_MCU”连接到DC-DC转换器的使能引脚来实现,从而使能电源。这也将启用微控制器,一旦微控制器启动,它将保持 DC-DC 转换器的启用。
当接收到睡眠/断电信号时,微控制器将禁用电源的使能。这会完全关闭电源(如自毁),实现超低 (0 mA) 功耗。
时序示例

控制和状态信息以及时序示例如图 4所示。
图 4 WAKE_IN、ACK、ERROR 和 POWER DOWN/SLEEP 的控制和状态时序示例。
WAKE_IN :该信号由主 ECU 通过简单地置位 HW_WAKE 来触发。所有其他 ECU 将根据该信号唤醒。信号的典型高电平时间为 100 ms(低电平时间不适用)。
ACK:从属 ECU 通过简单地置位 HW_WAKE 来向主控发送确认信号。信号的典型高电平时间为 20 ms(低电平时间不适用)。
错误:从属 ECU 发送模式信号高-低-高-低-高,以传达错误状态。信号的典型高电平时间为 20 ms,而典型低电平时间为 10 ms。
断电/睡眠:通过将 HW_WAKE 置位 200 毫秒,断电或睡眠信号将从主站传送到所有从站 ECU。