PID
补偿器一直是工业应用中使用广泛的闭环
控制器之一。然而,这种控制器的调整被广泛认为是一项困难的技术。与任何熟悉调整的人交谈通常很快就会导致关于极点、零点和裕度的非常令人痛苦的讨论,这使得随意倾向的工程师要么停下来,要么,如果他因为截止日期临近而感到勇敢,则直观地调整循环。
自 1900 年代初以来,PID 补偿器一直是工业应用中使用广泛的闭环控制器之一。然而,这种控制器的调整被广泛认为是一项困难的技术。与任何熟悉调整的人交谈通常很快就会导致关于极点、零点和裕度的非常令人痛苦的讨论,这使得随意倾向的工程师要么停下来,要么,如果他因为截止日期临近而感到勇敢,则直观地调整循环。
大多数时候,如果仔细地完成,直接在真实系统上调整循环将给出有利的结果,并且非常幸运的是,可以忽略大量数学运算。这几乎就是为什么数学调优在工程师中仍然不太受欢迎的方法的原因。这将是一系列文章,我希望它们能够揭开大部分数学的神秘面纱,但又不会太枯燥。
这些材料的大部分内容很大程度上基于我与罗斯·福斯勒的讨论,我在控制理论方面的大部分实践知识都归功于他。
为什么是PID?
首先,为什么我们需要 PID 控制器?是的是的; 教科书都说你需要它们,然后给出了一个类似于下面的相当通用的图表:
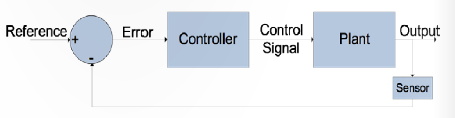
图 1:通用植物
但是,在现实世界中,我们在哪里需要它们?例如,考虑一个简单的室温控制器。它可以打开以供暖房间或关闭。这种情况下的
调节器是一个简单的
开关或迟滞控制器。由于我们对温度的偏差不太挑剔,因此这种类型的控制器工作得很好。

图 2:一个简单的歇斯底里控制器
现在,假设我们想要一个更一致的温度,并且有一个可以平稳控制加热量的加热元件;也就是说,我们不仅仅拥有关闭和开启状态。这可能是 PWM 或某种其他形式的输入,其大小决定了元件产生的热量。
显示了一组非常简单的规则,可以将其编码到任何通用
微控制器中来完成此操作。我们甚至可以引入一个小公差带,使控制器在所需温度附近平滑。
经过仔细检查,该流程图相当模糊,“增量控制信号”可能意味着增量 1% 或 10%。此外,我们知道,仅仅因为我们打开加热元件,温度不会立即改变。从本质上讲,我们的房间具有相关的“植物特征”。试图非常快地改变温度只会导致我们超过或低于所需的室温。
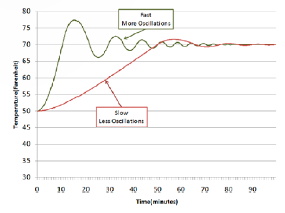
图 4:快速增量与慢速增量
然而,通过一些尝试和错误,我们将能够达到一个可以在温度反应速度与我们可以容忍的超调量之间进行权衡的程度。这对于简单的系统来说效果很好,但有时植物的特性可能会很糟糕。

图 5:一些典型的植物特征
例如,在图 5 中,一种情况特别有趣,植物初朝您想要控制的相反方向摆动!尝试使用简单的规则集来控制此类系统对于处理它的工程师来说可能会变成一场噩梦。
理论上,与简单递增/递减规则相关的通用规则可以适用于任何系统,只是达到所需稳定点的速度可能比实际需要的速度慢得多。这是一个关键点,因为抑制干扰是所有闭环系统的基础。例如,由于输入电压突然变化或负载突然下降而导致的电压尖峰对于由其供电的设备来说可能是不可接受的。
简而言之,我们需要一个能够准确描述被控对象特性的数学模型,以便能够设计出满足我们的超调、拒绝速度等标准的控制器。具体来说,以上两个术语更正式地称为相位裕度和带宽。
此外,能够在纸上设计控制器将为控制参数提供一个极好的起点,并节省花在调整 PID 环路上的大量时间。
在第二部分中,我将展示如何使用波特图了解植物特征,特别是如何将图与其时间响应相关联。