在汽车领域,
微控制器和
电子产品的主导通信标准是控制器局域网(CAN
总线),这是一种不依赖中央管理的强大通信协议。由于大多数车辆及其
发动机舱的恶劣环境,CAN 协议旨在克服尽可能多的电磁和物理故障,即使在通信线路短路时也能正常工作。
CAN 总线中使用两种不同的通信线路:CANH 和 CANL,分别为高电平和低电平。这两根线有多种短路方式。它们可以短接至地、短接至 VCC 或短接在一起。
在汽车领域,微控制器和电子产品的主导通信标准是控制器局域网(CAN 总线),这是一种不依赖中央管理的强大通信协议。由于大多数车辆及其发动机舱的恶劣环境,CAN 协议旨在克服尽可能多的电磁和物理故障,即使在通信线路短路时也能正常工作。
CAN 总线中使用两种不同的通信线路:CANH 和 CANL,分别为高电平和低电平。这两根线有多种短路方式。它们可以短接至地、短接至 VCC 或短接在一起。
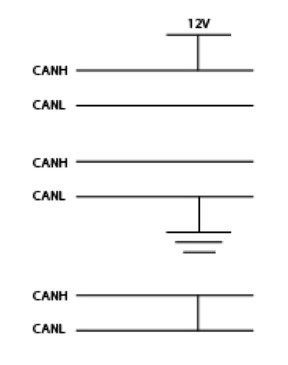
其中一些情况允许数据仍然被传输,但代价是增加功耗。当不同节点短路至其隐性状态时,例如 CANH 短路至 VCC、CANL 短路至接地,则可以进行传输。如果两个节点短接在一起,则无法进行传输。
了解 CAN 总线可能发生故障的不同方式,并充分了解其在每种情况下的行为方式,缩小故障范围可能是一个简单而直接的过程。在本应用笔记中,讨论了安森美半导体 NCV7341 收发器的行为,描述了其在无故障情况下以及存在通信问题时的行为。这些见解也适用于安森美半导体的 AMIS-30660 和 AMIS-42665,只需进行的更改。
HS-CAN简介
检测故障
– 故障类型
– 不同故障的行为
这如何适用于这三个中的任何一个
本应用笔记分析了总线上出现性短路时 HS?CAN(= 高速 CAN)节点的行为。仅考虑距离节点相对较近的短路。
HS=高速
尽管所有示例都涉及 NCV7341 收发器,但本应用笔记中的结论和数据同样适用于安森美半导体的其他 HS?CAN 在
某些考虑的故障模式下,无法传输到总线(CANH 接地短路、CANL 短路)至 12 V,CANH 与 CANL 短路)。CAN 控制器仍在尝试发送
MCU 应用软件请求的数据帧,但无法发送任何显性符号。
隐性高
故障有多种类型:CANH 和 CANL 对 GND、VBAT 或彼此短路。每个人都有不同的行为。通过查看功耗、TxD 低占空比以及通信的成功或失败可以指示故障类型。