传统Wi-Fi和
蓝牙定位解决方案的缺点
例如,Wi-Fi 指纹只能提供低至 10m 左右的精度。Wi-Fi 飞行时间,也称为往返时间 (RTT) 或 802.11mc,可达到 1-2m,但功耗较高。虽然该技术已经面世一段时间了,但尚未在现场大规模部署。
与此同时,使用蓝牙定位设备传统上使用“接收信号强度
指示器”(RSSI)。基于 RSSI,可以估计所谓的“锚点”参考站和设备之间的距离,但不能估计设备相对于锚点所在的角度。通过使用三个或更多锚点,您可以计算设备的位置,但精度级别只能在三到五米之间。
蓝牙测向:室内定位变得更加精细
蓝牙规范 5.1 版引入了“测向”功能。这代表着在的室内定位能力方面向前迈出了非常重要的一步,以至于它有望解锁当今工程师正在寻求创造的一些改变游戏规则的产品和服务。测向不依赖于蓝牙设备发出的信号强度来确定其位置。相反,它使用具有多
天线阵列的固定锚点来计算角度使用到达角 (AoA) 或出发角 (AoD) 技术来测量信号。通过计算来自/到至少三个锚点的信号的角度,并确定它们相交的位置,您可以获得附近设备的亚米级位置读数。
u-blox - 室内定位图 1
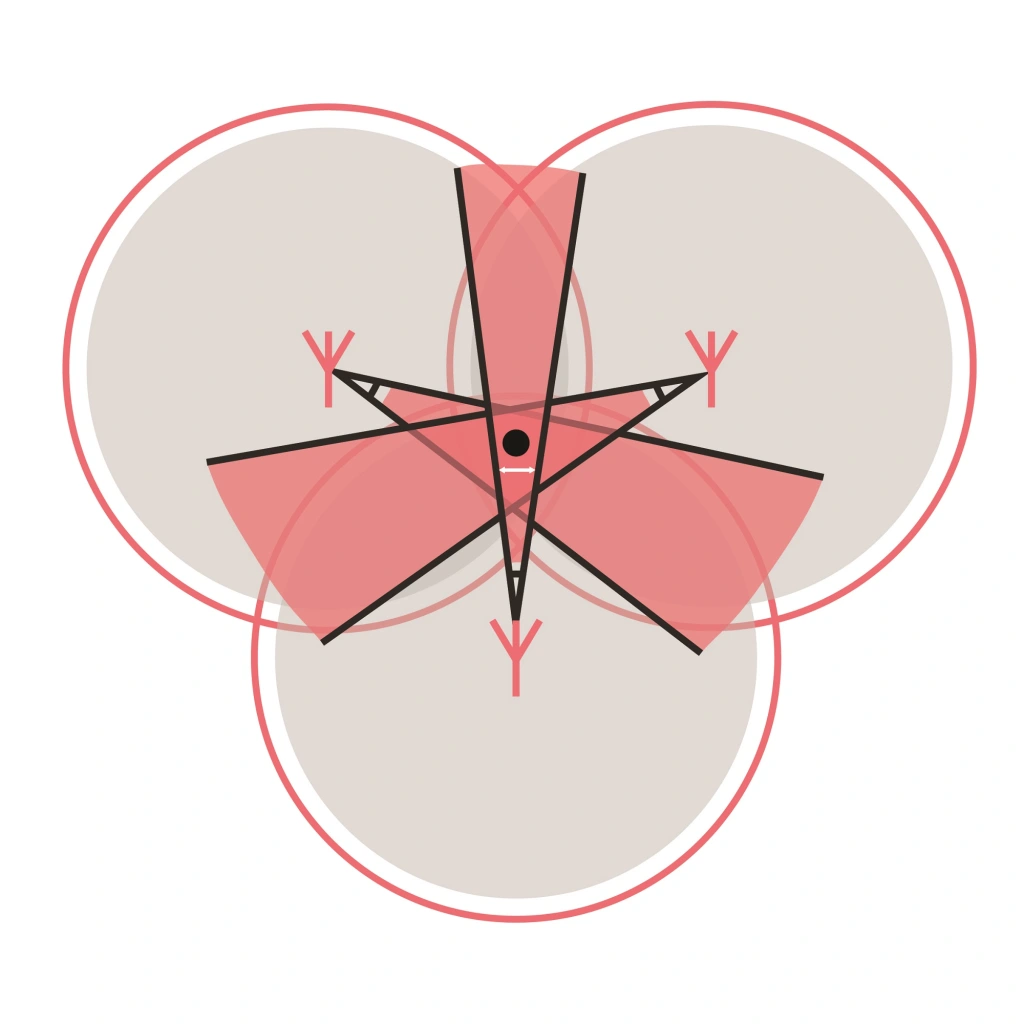
图 1。通过计算到达三个固定锚点的信号的角度,并计算它们的相交位置,您可以在一米范围内识别设备的位置。
让我们简单地看一下这些角度是如何计算的。
在 AoA 设置中,移动设备发出蓝牙测向信号。该信号到达锚点阵列中的每个天线时,相对于该锚点中的其他天线有轻微的相移。假设信号传播平面波,这些相位差可用于计算信号的到达角。AoA 可用于跟踪或实时定位服务 (RTLS)。

图 2. 到达角 (AoA) 设置根据多天线阵列中每个天线观察到的微小相位差来计算传入蓝牙测向信号的角度。
通过 AoD,信号从锚点上的每个天线发送到附近的蓝牙设备。这些信号以轻微的相移到达该设备。结合天线几何形状的信息,这些相位差可用于计算信号与锚的偏离角。AoD 是实施寻路和导航解决方案的有效方法。
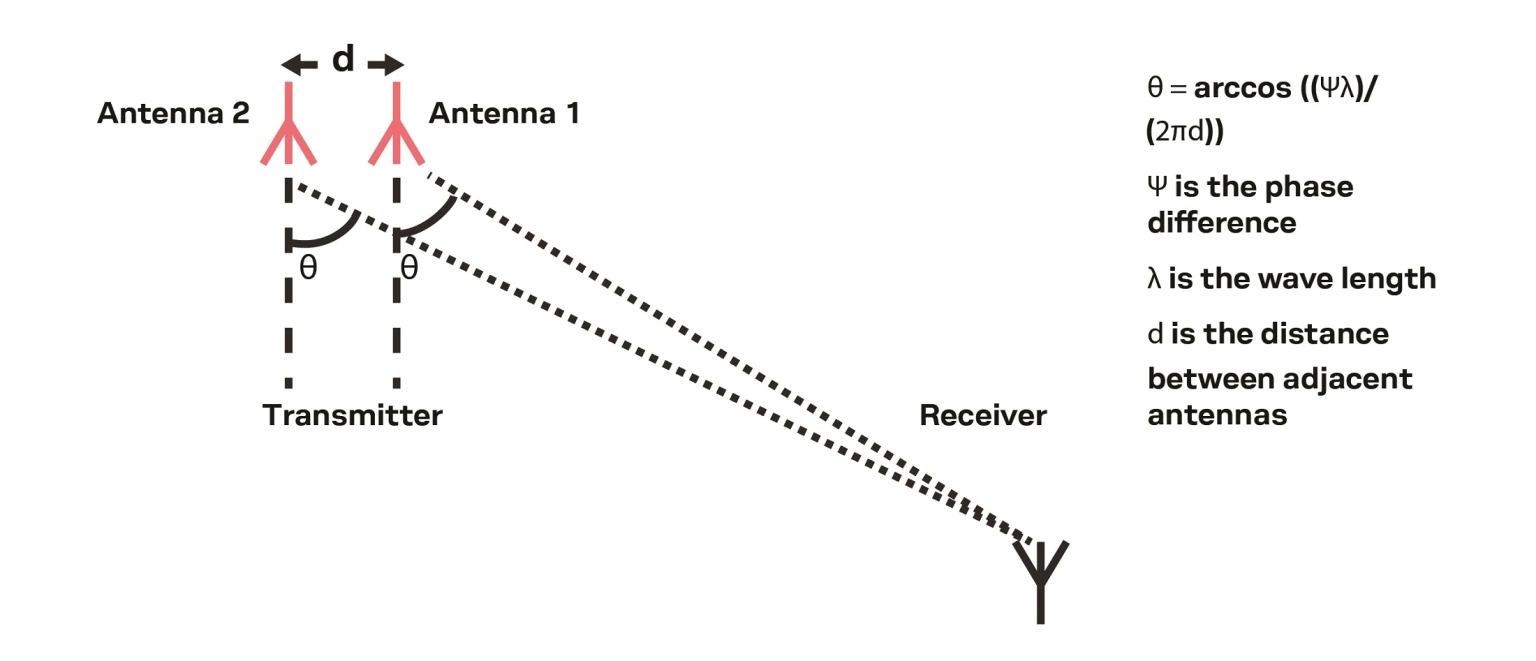 图 3. 出发角 (AoD) 设置使接收设备根据不同天线发送的信号之间的相位差来计算信号离开天线阵列的角度。
图 3. 出发角 (AoD) 设置使接收设备根据不同天线发送的信号之间的相位差来计算信号离开天线阵列的角度。
进行测试
我们在许多用例中广泛测试了蓝牙 5.1 测向技术。近的一个例子是 AoA 概念验证,我们使用伺服系统创建一个旋转头,该头将转向我们正在跟踪的移动设备。这将提供明显的证据,证明测向解决方案正在发挥作用。
此特定设置中的移动设备是
u-blox 应用板,其上带有 NINA-B406 蓝牙 5.1 低功耗模块。其广播范围设置为 10m 左右,但如果需要的话可以扩展。
在此 POC 中,我们有一个锚点,其中包括带有 NINA-B411 蓝牙低功耗模块的 u-blox 天线板和我们的 u-connectLocate 软件(稍后将详细介绍)。天线板包含五个交叉极化天线元件,以确定垂直和水平平面上的输入信号角度。然后板上的软件计算到达角。然后,该信息用于实时旋转移动头以面向移动设备。
下面的视频显示了实际设置,当设备在房间里移动时,头部会不断跟踪设备。