霍尔效应传感器为位置感测提供了高效的解决方案。使用霍尔传感器,传感器和运动部件之间没有机械连接,因此可以获得更高的可靠性和耐用性。
有几种不同的磁传感器配置可用于基于霍尔效应的位置感测应用。在本文中,我们将研究一种可以产生线性高斯与距离曲线的滑动磁配置。我们还将看到可以使用磁铁组合来调整高斯与距离曲线的斜率。
在上一篇文章中,我们研究了简单的正面和侧滑配置。这两种布置如图 1 所示。
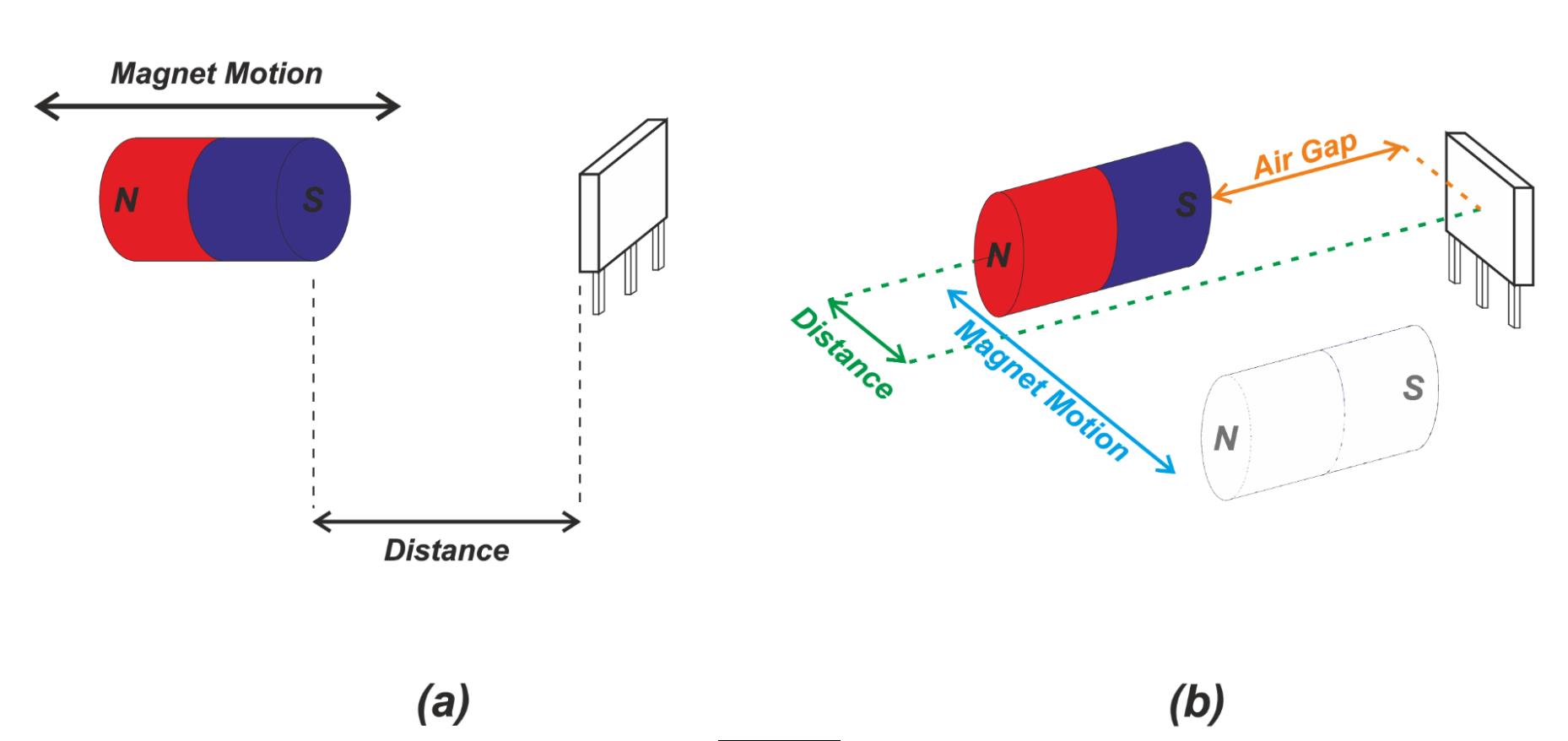
我们看到感测场和距离之间的关系在上述安排下是非线性的。这些磁传感器配置通常用作精度要求不是非常苛刻的应用中的接近检测器。
然而,当需要沿传感行程对位置进行精细控制时,我们更愿意在传感器输出和位移之间建立线性关系。事实上,虽然我们可以使用软件来消除传感器线性误差,但线性响应是可取的,因为它可以提高测量精度并便于系统校准。
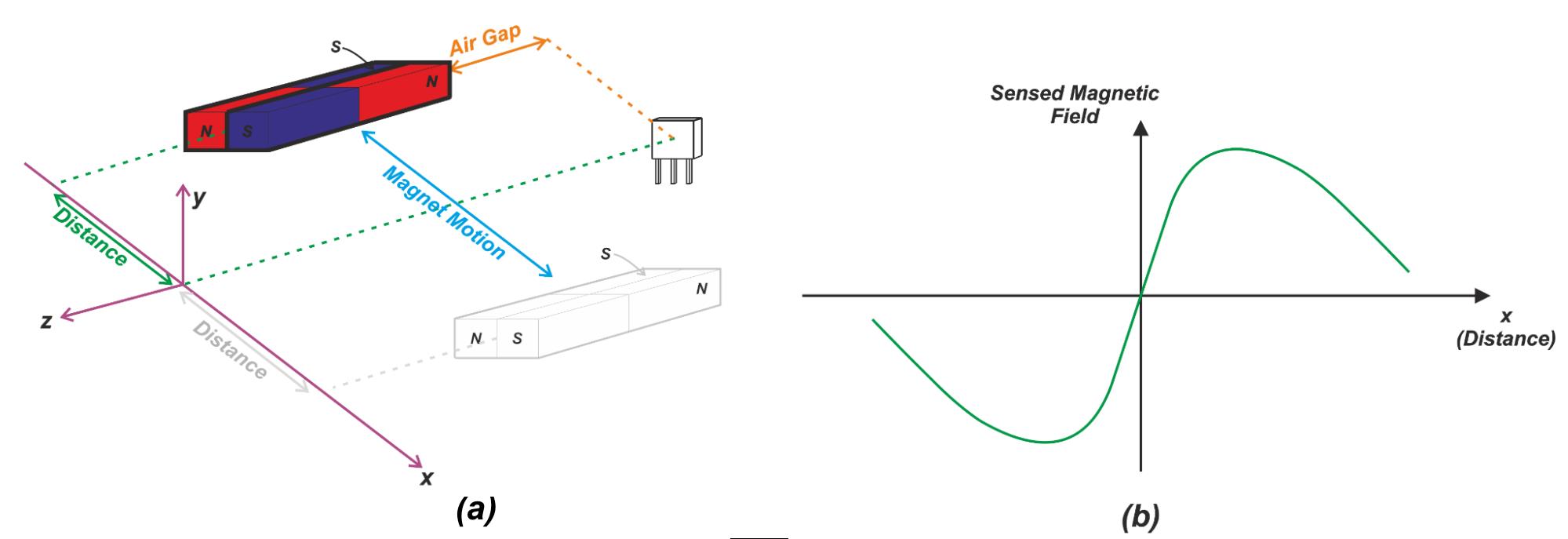
图 2(a) 显示了一种滑动排列,它在感测磁场的 z 分量与磁体位移之间呈现线性关系。图 2(b) 显示了磁通密度(在 z 轴方向)与磁体行程的关系。
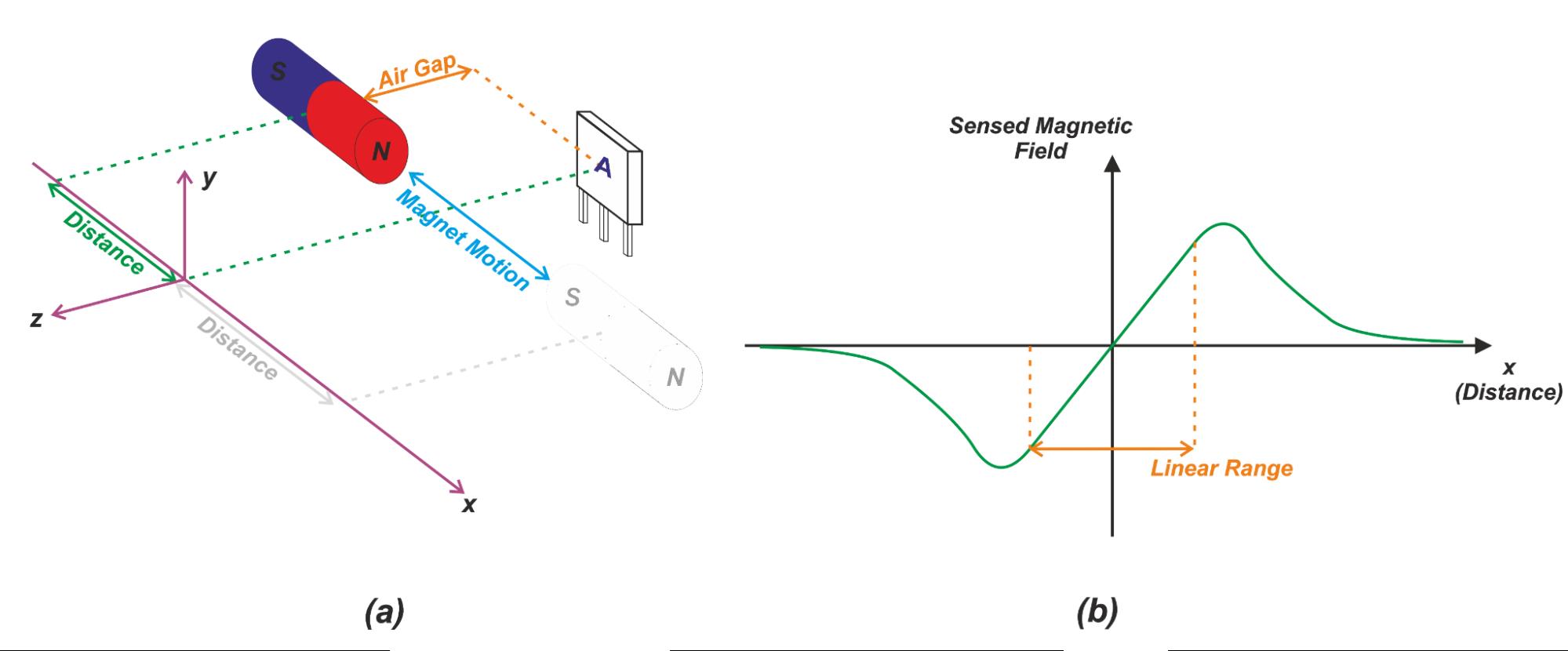
当磁铁位于传感器的左侧(x<0)时,磁铁的磁场线会产生一个与 z 轴方向相反的分量。请注意,磁力线从磁铁的北极到南极。
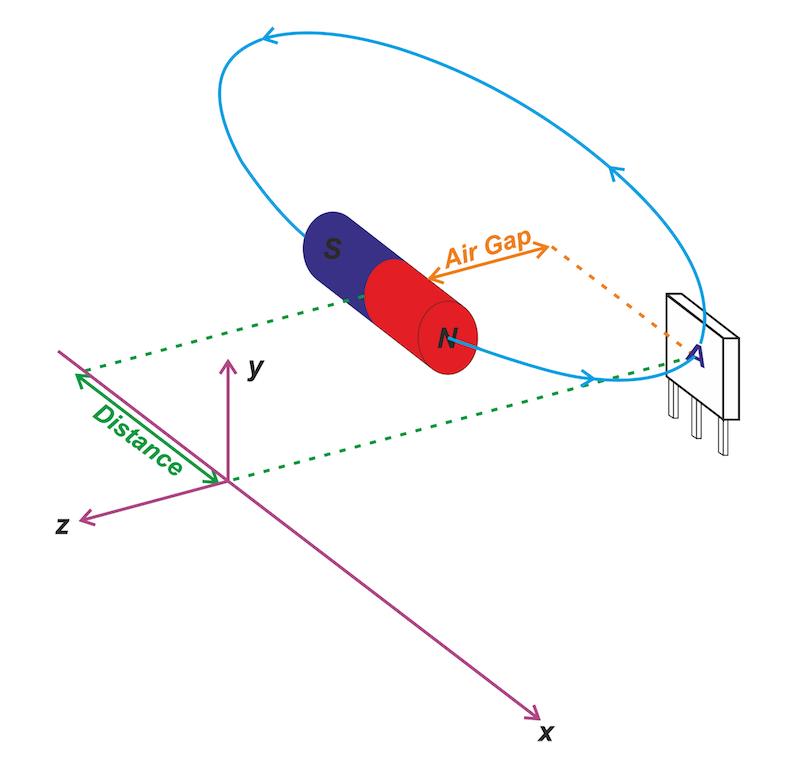
图 3 显示了穿过传感器的磁力线之一。
因此,对于 x<0,感测磁场的 z 分量为负。当磁铁到达中心位置时,z 方向的磁场将为零。对于正位移(x>0),磁场会产生z轴方向的分量(正磁场)。对于任一方向的大位移,较少数量的场线可以通过传感器。因此,传感器感测到的磁场减小。
这种布置的关键特征之一是磁场的 z 分量与原点周围的位移呈线性关系。该线性范围如图 2(b) 所示。线性区域的长度略小于磁体的长度。例如,对于 22 毫米的磁体,线性区域可以从大约 -10 毫米扩展到 +10 毫米。这种线性行为使我们能够更轻松、更准确地检测移动物体的位置。
我们可以使用更长的磁铁来增加上述配置的线性范围;但是,某些应用无法在系统中容纳大磁铁。此外,对于长磁铁,成本可能是一个限制因素。如果需要检测比磁铁长度更长的行程,我们可以使用传感器阵列来扩展测量范围。如图 4 所示。
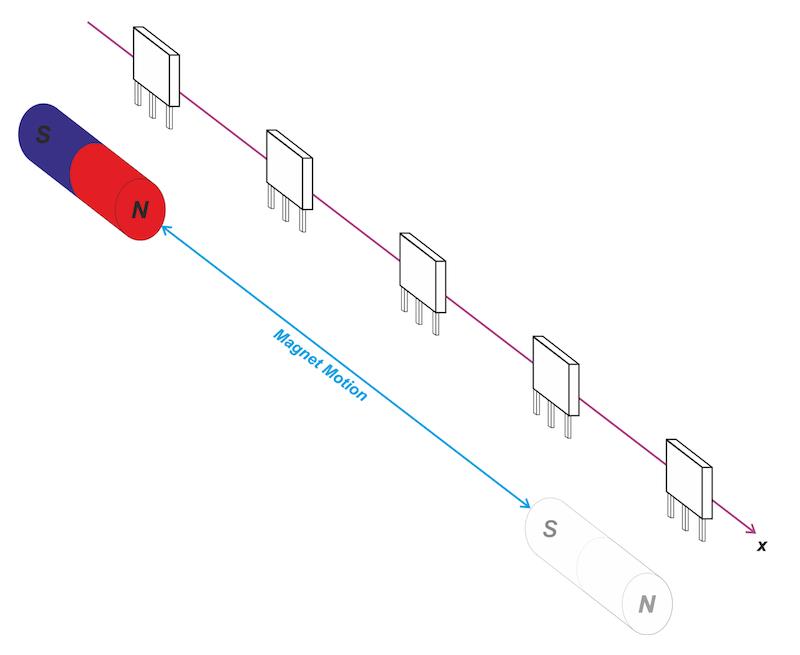
在这种情况下,我们需要处理来自多个传感器的数据以找到物体位置。有关详细信息,请参阅此TI 应用说明。
图 2 中的滑行配置也可用于检测对象的存在(而不是确定对象在其行程中的位置)。假设在图 2(a) 所示的示例中,磁铁从左到右平行于 x 轴移动。假设我们的数字(开/关)霍尔效应传感器的磁性操作点和释放点如图 5 所示。

随着磁铁从左到右接近传感器,磁场强度变得越来越大。在 D2 处,感测到的磁场等于开启传感器的磁工作点。将磁铁靠近传感器会产生更大的磁场并使传感器保持开启状态。
现在,如果我们朝相反的方向(从右到左)移动传感器,磁场就会减弱。在 D1 处,磁场变得小于关闭传感器的释放点。这使我们能够检测到对象的存在。我们还可以使用此结构在对象笔划中定义一个参考点(传感器的切换点)。
根据图5中的磁通密度与距离曲线,给定的磁通密度可以由两种不同的位移产生。这就是为什么上述布置通常用于机械结构以传感器切换只能在一个特定位移处发生的方式限制物体行程末端的应用。这可以防止在解释结果时出现任何歧义。
我们在上面讨论过,数字(开/关)霍尔效应传感器可以与滑动配置一起使用,以定义物体行程中的参考点。如果我们可以增加高斯与距离曲线的斜率,我们可以更地检测参考点。
斜率越大,给定位移导致磁场强度变化越大,传感器更容易检测到。图 6(a) 显示了一个磁系统,其斜率大于图 2(a) 中配置的斜率。
在这种情况下,一对磁铁的北极和南极相对于传感器移动。总磁场由两个磁铁的磁力线决定。在这种布置中,距离是相对于磁体对的中心测量的。图 6(b) 显示了感应磁场的 z 分量与距离的关系。在中心位置 (x=0),穿过传感器的一个磁体北极的磁力线数等于另一个磁体南极的磁力线数。因此,净磁通密度为零。
假设我们将磁铁从中心位置向右移动 (x>0)。这突然增加了来自南极的磁力线的数量,并产生了具有正 z 分量的磁场。类似地,当我们将磁铁从中心位置 (x<0) 向左移动时,我们会获得一个具有负 z 分量的相对较强的磁场。在原点附近,曲线的梯度高于图 2(a) 中的滑行配置,因为从北极到南极的过渡是突然发生的。高斯与距离曲线的这种相对较大的斜率可以帮助我们更准确地定义移动物体的参考位置。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。