图一
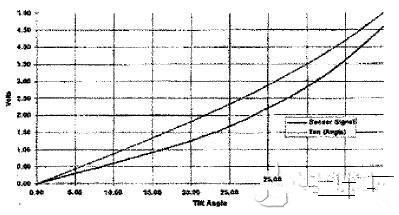
图二 传感器输出特性
3. 倾斜传感器在舰载天线控制中的应用
3.1舰艇的前进、海浪颠簸都会导致舰载天线随机座发生倾斜,所以为了保证天线能够连续准确地跟踪卫星,就要对天线轴架进行实时调整。由于天线的转动控制除了方位(Azimuth)与俯仰(Level),还有一个俯仰的垂直面(Cross level),因此要用到三个检测电机转速的角速度传感器和一个检测水平度的倾斜传感器。如图所示:
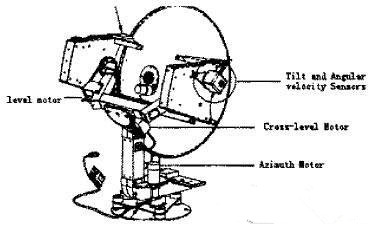
图三 舰载卫星天线示意图
3.2传感器参数及应用
测量范围±45°;输入电压+5v;输出+1~4vDC或4~20mA;分辨率为0.01°;非线性为±2°;工作温度为-40°C~+80°C;承受冲击能力为1000g,1msec。
对于双轴传感器则即有与单轴传感器类似的属性,又包含自身的复杂性。由于双轴共享中心电极,四个外围电极理想地分布于正方形的四个角,所以每个轴向的独立测量要用到两种方法:一是同一时刻只有一个轴向激励,二是双轴向同时加载不同频率的激励,如图所示,电极a、c间的激励信号频率为电极d、e间的二倍,要注意方法一中正交的两个轴向分别为对角线ac和de方向,而方法二中正交的两个轴向则是外围电极正方形的边缘ae和ad方向。
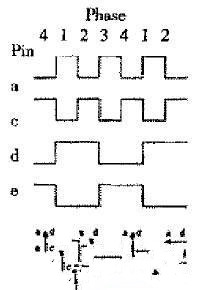
图四 外围电极波形
3.3传感器接口电路

图五 输入电路框图
从图中可以看出,由于传感器输出为微弱的模拟信号,所以必须把传感器输出的模拟量进行预处理,又称信号调理,并且经过A/D转换变成数字量,处理器才能对其进行分析处理。具体到电解质型倾角传感器,以某型舰载天线为例,实际应用电路如下图所示:

图六 传感器应用电路
图中U5构成传感器输出CTR端信号的反相放大电路,F1,F2来自处理器输出端口控制信号,为频率50HZ、相位差180°的方波,经过反相器作为传感器的LV和CL电极驱动,既可实现每对电极上信号极性的交替变化,又能提供水平和垂直水平二维倾斜度测量的选择。F1,F2同时又作用于多路输入选择器U6的控制端A和B,对应于每对电极上信号极性的变化,选择控制相应极性的信号作为输出。
4.结束语
电解质型倾角传感器具有良好的复现性、可靠性和较高的,在应用中需要特别注意的是:⑴驱动信号F1,F2必须为直流分量为零的交流电压信号,因为直流会使电解质产生电解反应而失去导电性,对传感器造成不可逆转的损坏。⑵避免使用波峰焊接以及化学有机溶剂洗刷,以防止传感器输出特性的改变和电解液泄露。
本文作者创新点:为确保其可靠运行,应在处理器端口引脚和传感器之间接上CMOS 反相器。微处理器可以设置成每秒唤醒或几次进行新的测量,同时采样驱动信号中点电压作为参考,这样每次测量分两步完成:首先计算传感器信号减去参考信号的值,然后加上反相驱动信号并计算参考信号减去传感器信号的值,将两次测量结果相减得到所需倾斜值的2 倍且使系统产生的偏差相抵消。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。