今天,用 Android 或者 iOS 手机或平板电脑连接、控制的玩具已很常见,而集成了采用蓝牙和 Wi-Fi 无线连接功能各种玩具则出现了爆炸式增长。 在商场货架上,可以看到各种各样的机器人、无人飞机和许多游戏机都集成了无线接口。 现在,这些玩具能以高性价比方式集成无线接口、多轴传感器、小尺寸显示屏、触控以及其它功能,而这一切要归功于这些元件的实现成本已大幅降低。
在手机、平板电脑中使用的此类器件已大批量生产,导致了元件成本急剧下跌。这两种设备都集成了 Wi-Fi 和蓝牙收发器,以及作为基本规范一部分的运动传感器、陀螺仪、GPS接收器、触控屏。 不仅无线连接的成本在下滑,而且在一代互连玩具中也能找到身影的多轴传感器、微控制器以及其它元件的成本也在下滑。 此外,由于大多数玩具倾向于由电池驱动,因此功耗也是所有这些元件的一个关键要求,从而促进了低功耗蓝牙标准 (BLE) 及其姊妹标准——智能蓝牙的采纳。
那么,什么是智能蓝牙呢? 从本质上讲,智能蓝牙和低功耗蓝牙相同,但后者采用通用属性规范 (GATT),在属性协议 (ATT) 顶层构建。 GATT 规范为按照 ATT 传输和存储的数据确定了通用工作模式和一个构架。 GATT 为低功耗蓝牙硬件定义了服务器和客户端角色。 由于 GATT 用于发现服务,因此 GATT 和 ATT 规范在低功耗情况下属于强制执行的规范。 软件开发人员使用 GATT 能够很容易地简化手机或平板电脑与玩具之间的发现和链接过程。
在蓝牙开发者文档的术语中,GATT 规范规定了规范数据交换的结构。 这种结构定义了规范中使用的服务和特征等基本要素。 这个层级结构的顶层就是规范。 一个规范包括完成使用实例所必需的一个或多个服务。 服务则由特征或对其它服务的引用组成。 每个特征包括一个值并可能包含有关该值的可选信息。 服务、特征和特征的组成(即值和描述符)包含规范数据,且均保存在服务器上的属性中。¹
低功耗蓝牙标准旨在通过建立非常快的连接(若干毫秒)并传输极少量数据来降低功耗。 这些技术可以将功耗降至传统蓝牙的十分之一。 BLE 设备可以进入休眠模式,并在发生事件活动时唤醒。 而且,其功耗小于 15 mA,平均功耗约 1 µA。 因此,一颗小型纽扣电池(例如 CR2032)便可为设备供电长达 10 年之久。
对于寻求在功耗敏感的小型便携设备中添加 BLE 或者智能蓝牙的设计人员,可以考虑 BL600 系列模块(Laird Technologies 提供)。 BL600 模块基于 Nordic Semiconductor 的 nRF51822 芯片组,在紧凑的 19 x 12.5 mm 基底面内实现了低功耗和很好的覆盖范围。 该模块包含支持 BLE 应用开发所需的全部硬件和固件。 BL600 模块也完全通过了蓝牙终端产品鉴定,设计人员可直接将其集成到设备中,无需再进行蓝牙鉴定。
同样,Panasonic 的 PAN1326/1316 系列 RF 模块也同时具备了低功耗蓝牙和智能蓝牙连接功能。 这种技术融合为短距离应用创造了一种低成本、超低功耗无线网络解决方案。 PAN1326/1316 主机控制接口 (HCI) 系列还为 Texas Instruments 的 CC2564 器件提供了模块格式,使其方便使用。 Panasonic 的小型基底面技术能让模块基底面(含天线)缩小至仅 85.5 mm²。 这些模块可以容纳 1.3mm 焊线间距、至少为两层结构的 PCB,从而简化了制造、实施过程。
Panasonic 还针对三种蓝牙标准提供三模开发模块。 这种模块可直接插入 Panasonic 开发套件以及 Texas Instruments 的 MSP430 和 Stellaris 实验板中,并带来了针座连接器优势,以简化原型的布线和现场试验。
一个玩具即是一个嵌入式控制系统
互连玩具的基本架构非常类似于嵌入式控制系统——通常包括一个中央控制处理器,带有本地存储器、电源管理功能、用于连接多轴传感器或开关的各种信号输入、控制一个或多个电机的附加输出信号、一个显示屏或指示灯,或一些其它功能,此外,还配备用于连接 Wi-Fi 和/或蓝牙无线电的无线接口(图 1)。 今天的控制器通常是一款基于 ARM® Cortex™-M0 或 M3/M4 处理器内核的高集成度微控制器,无线电功能则通常依赖一个包含发射/接收电路和功率放大器的独立芯片或模块。

图 1:互连玩具的内部电子子系统简图,如 Orbotix 的 Sphero。该简图反映了一个典型的嵌入式控制系统。 微控制器执行程序,而其 I/O 引脚则用于连接并控制不同的传感器、电机、开关、显示屏和无线电。
由 Orbotix 开发的 Sphero 球形机器人是市面上较吸引人的互连玩具之一(图 2)。 该公司在一个接近高尔夫球大小的透明塑料球内置入了一个完整的系统,该系统包括一个内部电池无线充电系统、一个基于 Cortex-M4 的微控制器(STMicroelectronics 提供)、一个 ARM 处理器(运行蓝牙堆栈协议)、一个 Texas Instruments 电机驱动器(控制电机)、一个 Bosch 陀螺仪传感器、多个彩色 LED 灯(允许用户改变 Sphero 球形机器人的颜色)以及一个 Amp’edRFd 提供的传统蓝牙无线接口。 第二代 Sphero 产品用智能蓝牙解决方案取代了传统蓝牙,将会降低功耗。 在充满电的状态下,Sphero 球在全加力游戏规则下可以玩一个小时,且其控制距离可达 100 英尺。

图 2:Sphero2 是 Orbotix 公司开发的一代球形机器人,这款产品由通过低功耗蓝牙无线链路连接的 iOS 或 Android 智能手机或平板电脑控制(上图)。 用户界面简单,可到 Apple iOS 或 Android 智能手机,或平板电脑上(下图)。
在如何运用智能手机或平板电脑实现新功能方面,由 Wowwee 和 Parrot 等公司推出的玩具机器人和无人飞机便是很好的实例。 例如,Parrot 的“Jumping Sumo”两轮玩具机器人配备嵌入式摄像头,能够通过 Wi-Fi 连接将视频内容传回智能手机或平板电脑(图 3 左)。 其中,Wi-Fi 连接也用于控制,用户可使机器人沿圆周滚动或跳跃,其跳跃高度超过 2.5 英尺并且在下落时能保持滚轮先接触地面。
Parrot 的 AR 无人机 Drone2.0 是一款配备高清摄像头的四螺旋桨设备,其摄像头能以 30 帧每秒的速度捕获 720p 视频内容,并利用 H.264 编码器进行视频编码(图 3 右)。 尽管可利用集成 WI-Fi 接口将视频内容发送回智能手机或平板电脑,但该系统还配备了 USB 插槽,方便用 U 盘在本地保存视频内容。 板载计算机/控制系统采用一个基于 1 GHz 32 位 ARM 的微控制器和一个 Texas Instruments TMS320DM64x 视频 DSP 芯片。
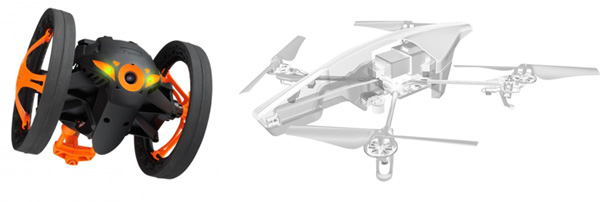
图 3:Parrot 的跳跃机器人玩具 Jumping Sumo 可在空中的跳跃高度为 2.5 英尺,配备一个嵌入式摄像头,能通过 Wi-Fi 接口将视频内容传回智能手机或平板电脑(左图)。 AR 无人机 Drone2.0 Quadricopter 也是 Parrot 产品,具有极高的控制和自动稳定功能,能在飞行中捕获高清视频内容。 采用多个传感器提供稳定、定位、定向和地面速度数据。
Wi-Fi 接口提供 802.11b/g/n 和多传感器连接,具体包括三轴陀螺仪、加速计和磁力计(用于 GPS 定位)、压力传感器和超声波传感器(用于海拔高度测量)。 另一个低分辨率摄像机 (QVGA) 以 60 帧每秒的速度捕获图像,以协助测量地面速度。 这款无人机由四个转速达 28,500 RPM 的无刷电机提供升力,每个电机由 Atmel 8- MIPS AVR 系列 CPU 控制。 采用一个 1000 mAH 可充电锂聚合物电池提供电源。 Apple 应用商店提供一款名为 AR.Free Flight 软件应用,能够让 iPhone、iPod Touch 或 iPad 控制这款无人机。
如果工程师正在为一个设计项目部署 Wi-Fi 连接,则应关注一下 Skyworks 的 SE2594L,这是一款完整的 802.11a/b/g/n WLAN RF 前端模块,具备功率放大器、滤波、功率检测器、T/R 开关、多路复用器和相关匹配功能等全部功能。 所有 RF 端口均针对易用性而设计,可匹配 50 Ω 电阻,从而能简化 PCB 布局和收发器的 RFIC 接口。 SE2594L 还包括一个用于每个频段、发射链的发射器电源检测器,且每个发射链的动态范围均为 20 dB。 SE2594L 外形小巧,是一个完整的、能涵盖从收发器输出到天线的 2.4GHz 和 5GHz WLAN RF 解决方案。
总之,市场上各种各样的无线玩具如雨后春笋般涌现,从小型直升飞机、多螺旋桨无人机,到在办公室地面上游走的机器人阿凡达,应有尽有。 许多设备都充分利用了无线技术控制运动,有时还用于收发视频内容。 本文介绍了不同玩具供应商用来实现连接和控制的蓝牙、Wi-Fi 等一些技术,甚至还涉及到窝蜂子系统。 正如本文中所有实例展示的那样,互连玩具概念可以千变万化,受限的只是设计人员有限的创造力
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。