本文出于对能源消耗及智能化水平的考虑,传统的路灯控制方式已不能满足社会发展的需求。在分析了单片机的性能优势之后,从绿色能源、节约能源和性价比的角度出发,提出了一个基于MSP430为的设计方案。单片机在规定亮灯时间内检测背景光强度,若背景光强度较弱启用热释电红外传感器开始探测人体和车辆发出的红外信号。当有人或车辆进入传感器探测区域,单片机输出脉宽调制信号PWM,并根据背景光强度调整LED路灯的亮度,选用合适的占空比来控制恒定电流源的工作电流来保证道路的可见度,从而完成对LED路灯的智能化控制。实验仿真结果充分证明了系统方案的可行性、高效性和稳定性。
近年来,随着经济的高速发展和汽车的逐渐普及,城市的交通问题已经引起人们越来越多的关注,城市道路照明的重要性也日益增大。目前,我国大部分城市的路灯照明都采用"全夜灯恒照度"的方式,控制方式仍然是简单的光控和时控等传统方式,这大大增加了城市的用电量,为此,政府承担着巨额的财政支出,而路灯照明设备的使用寿命也大大降低。因此,引入智能交通系统(ITS)成为提高城市交通管理水平的一个重要途径。
本设计以低功耗单片机MSP430为主控部件,采用热释电红外传感器检测人体及车辆发出的红外信号,运用光敏电阻检测背景光的强度,通过恒定电流源来控制LED灯光的强度。根据各个季节天黑的时间不同设置各自的路灯开启和关闭时间,在规定时间对移动物体进行检测,实现对路灯的智能化控制,提高了路灯照明的有效性,避免了电力资源的浪费。
1 热释电红外传感器与菲涅耳透镜
利用红外线传感器可以检测到物体发射出的红外线,从而可以检测到不同物体的存在。制造热释电红外传感器的材料,以陶瓷氧化物及压电晶体用得多,这类材料具有强烈的自发极化性能,当受到热辐射而产生温度变化时介质的极化状态随之发生变化。由于内部电荷的速度远远高于表面电荷的变化速度,晶体两端会产生数量相等而极性相反的独立电荷,这就是电介质的热释电效应。热释电红外传感器就是利用被测物体热辐射引起敏感元件温度的变化进行探测的。热释电红外传感器被广泛应用到安防监控、电子防盗、自动控制照明和工业自动控制等领域。
物体释放的红外线能量十分微弱,当直接用热释电红外传感器接收红外线时,灵敏度相对较低,一般情况下很难满足系统需求。为了提高热释电红外传感器的接收灵敏度,在其表面罩上一片菲涅耳透镜,其探测距离可以增加到原来的5~7倍。菲涅耳透镜[1]是一种由聚乙烯材料根据菲涅耳原理制成的塑料薄纹透镜,对红外线的透射率大于65%.根据菲涅耳透镜的工作原理可知,当有移动物体发射的红外线进入透镜的探测范围,菲涅耳透镜会产生一个交替的"盲区"和"高灵敏区",热释电红外传感器的两个反向串联的敏感元件轮流检测运动物体,形成一系列光脉冲后,进入传感器。所以,热释电红外传感器无法检测到静止的物体。菲涅耳透镜在安装时与热释电红外传感器之间的距离应满足与菲涅耳透镜的焦距相等。
2 控制系统硬件设计
控制系统硬件组成以MSP430为控制器,辅以外围电路如AD/DA 数据采集处理系统模块、热释电红外传感器模块、背景光检测模块和LED驱动模块等。其系统硬件框图如图1所示。

2.1 数据采集模块
2.1.1 物体定位检测
信号探测采用被动式双元热释电红外传感器P2288,并在其表面罩上一个菲涅耳透镜用来提高其探测灵敏度。它以非接触形式检测出人体及车辆放射出的微弱红外线能量并转化成电信号输出,物体定位检测电路如图2所示。当P2288探测到有人或者车辆进入到探测区域,P2288产生一个交变红外辐射信号,并输出一个微弱的电压信号(TTL电平)。
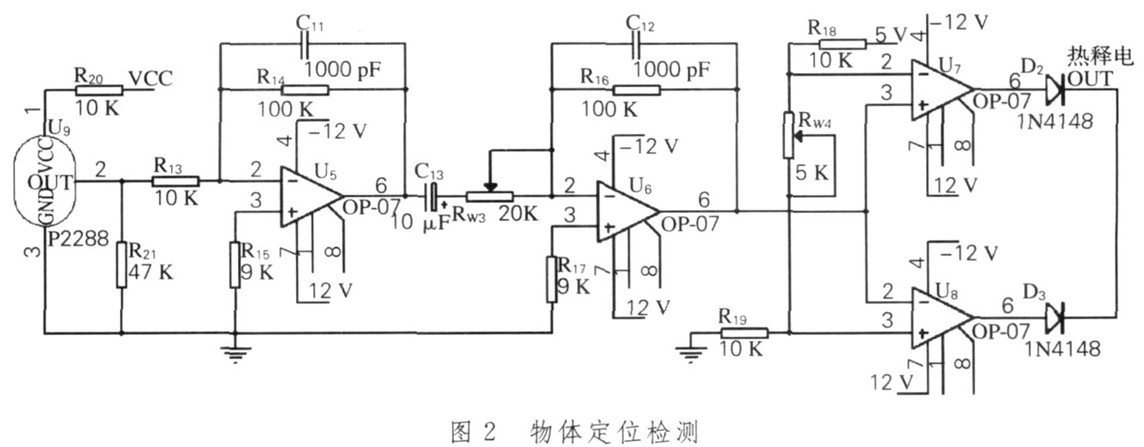
信号经过二级运放后输入到双限比较器当中,其中RW3用来调节二级运放的放大倍数,RW4用来设定两个门限电平Uref1(U7处)和Uref2(U8处),当探测电压大于Uref1时,U7输出高电平,U8输出低电平,则D2导通而D3截止,热释电OUT 为高电平;当探测电压低于Uref2时U7输出低电平,U8输出高电平,则D2截止而D3导通,热释电OUT为高电平;当探测电压介于Uref1和Uref2之间时D2和D3都截止,热释电OUT为低电平。经过放大和整形的信号输入到单片机当中。
2.1.2 背景光检测
光敏电阻是利用半导体的光电效应制成的一种电阻值随入射光的强度变化而改变的电阻器,入射光强时电阻值减小。背景光检测电路如图3(左)所示,三极管的集电极输出电压输入到A/D转换器当中。由于单片机当中已经集成了高的12位A/D 数模转换器,故选用其内部A/D转换器,其模拟量输入控制范围在0~5V,由单片机的存储及其控制寄存器Sref位确定。

当背景光强度强时光敏电阻阻值减小,三极管处在非工作状态,三极管的集电极输出低电平;当背景光强度较弱的时候光敏电阻阻值增大,三极管处在工作状态,三极管的集电极输出高电平。当输出高于设定值时,物体定位检测子系统开启。
同时为避免由于其他原因(如雷电、光源等)造成的影响,设置路灯开启判断时间为30s,30s后单片机检测到三极管的集电极输出确实高于预设值时,单片机发出物体定位检测开启信号。
2.2 LED恒流源驱动模块及PWM 驱动方式
LED由于寿命长、节能、环保和光电效率高等众多优点,成为了照明领域关注的焦点。根据LED的伏安特性曲线可知,LED正向伏安特性非常陡,微小的驱动电压的波动就会导致LED驱动电流的急剧变化,这将直接影响到LED的寿命、光通量和可靠性。LED 独特的电气特性使得LED驱动电路也面临更大的挑战,LED驱动电路关系到整个LED照明系统性能的可靠性。因此为防止LED的损坏,要求所设计驱动能够精准控制LED的驱动电流。本系统设计的恒流源是在恒压源模式控制上增加了一个电流串联负反馈,恒流源的输出值也反映了电压源输出的大小,但其可以控制LED的驱动电流,从而稳定控制LED的亮度。恒流源驱动电路如图3(右)所示。电流串联负反馈由U4和Q3组成。
系统采用PWM 对LED光亮度进行调节。用PWM 对LED进行调光实际上是某一固定直流电压经过以一定频率打开与闭合的开关,从而改变LED上的电压。假设某一固定直流电压能够提供的电流为Imax,开关频率为f 且闭合周期为t,则有通过LED的平均电流I为:

因此只要改变闭合周期t就可以改变通过LED的平均电流,进而改变LED的亮度。假设系统输出的PWM 的占空比为τ,PWM 的频率和输出电压分别为f 和UPWM,则由图3电路可知通过LED的电流值为:

式中,t0=Tτ,i为电流的瞬时值,UPWM为PWM的输出电压。在获得同样的发光亮度时脉冲电流驱动方式比直流电流驱动方式所需要的电流值更小,所以脉冲电流驱动可以给系统带来高效性。
3 系统软件设计
根据硬件设计时各个模块的功能和要求,系统软件的设计主要是和硬件电路相结合。本次设计将系统功能分为具有独立子功能的控制模块。
设计采用模块化的方式更易于阅读和理解,软件结构更加清晰,而且利于软件调试。系统软件方案主要由初始化程序、背景光检测程序、人体红外信号检测程序和RS-485协议等[6]构成。电路上电启动后,单片机进行初始化操作,电路控制系统进入工作状态,该系统的工作流程图如图4所示。
在规定亮灯时间内,如果背景光强度较弱,上位机向下位机发送开始工作命令和信息,否则下位机等待响应上位机发送命令。下位机响应后,当有人或者车辆进入红外探测区域单片机根据背景光的强度,输出脉宽调制信号PWM,驱动控制器点亮LED,保证LED光强度足以满足路面的可见度。如果下位机没有探测到红外信号,路灯LED熄灭。
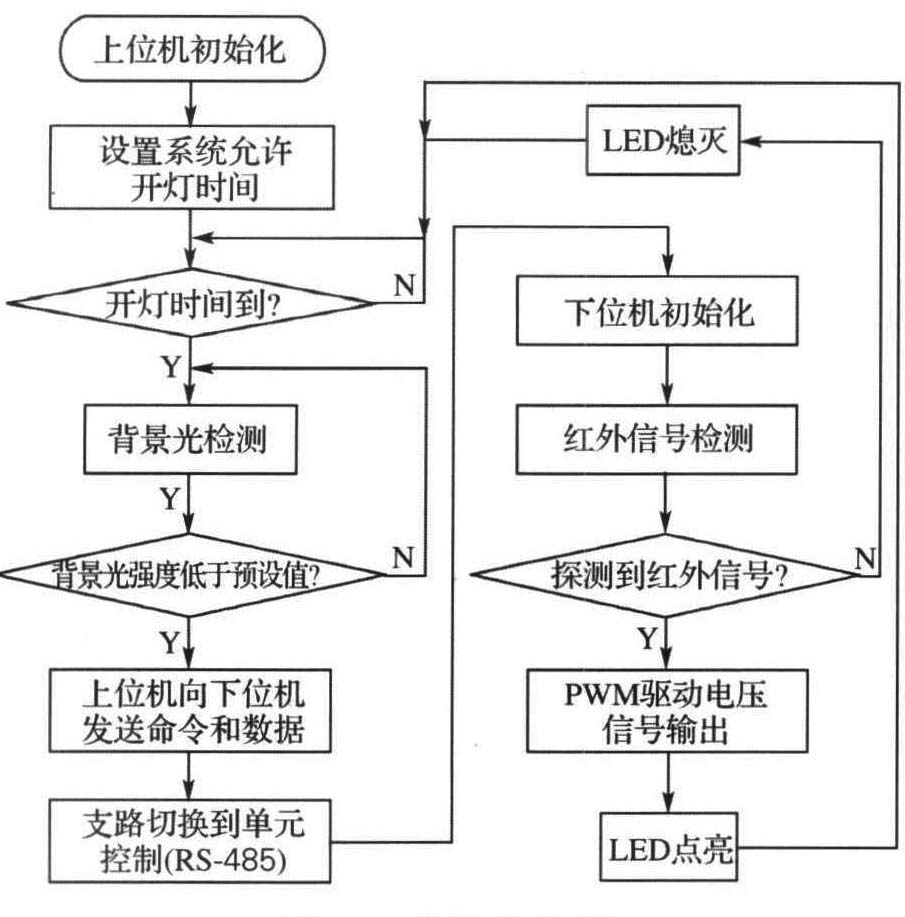
图4 系统流程图
4 实验结果及分析
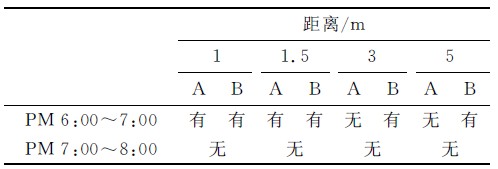
由于到达现场进行实验有一定的难度,所以实验仿真只对人体红外信号进行了检测。设置系统规定亮灯时间段为PM 6:00~7:00,将热释电红外传感器固定在实验室台上,传感器的输出端接在示波器的探头上,人走向传感器探测区域,观察示波器上有无波形输出。测试结果如表1所示,A表示传感器没有罩上菲涅耳透镜的输出结果;B表示传感器罩上菲涅耳透镜的输出结果。结果表明,系统可以控制智能路灯的开启时间;菲涅耳透镜可以显着提高传感器的探测灵敏度。
表1 传感器检测输出结果
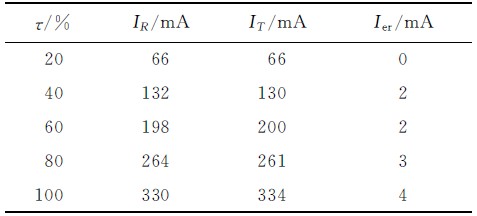
测试恒流源驱动电路的时候选用1 W 的大功率LED灯珠,通过调节PWM 的占空比来检测通过LED的电流值。如果LED亮暗的频率超过100Hz,人眼看到的就是平均亮度,而不是LED的闪烁。实验仿真设定PWM 输出信号的频率为1kHz,实验仿真结果如表2所示。从表2看出,恒流源的误差在±4mA,LED的工作电流与PWM 输出信号的占空比成正比关系。恒流源驱动电路虽然简单,但其性能非常。
表2 LED路灯工作电流测试
5 结 语
研究设计智能化、运行可靠和高效节能的路灯控
制系统,是智能交通系统的必然需求。系统以低功耗单片机为系统控制,使用RS-485通信协议完成上位机对下位机的控制,通过热释电传感器探测人与车辆发出的红外信号,利用MSP430的内部资源PWM 实现了路灯的智能调光控制。系统设计完全从节能和性价比的角度出发提高了路灯的用电效率和智能化程度,在节约能源、电力资源合理利用的今天,该系统有着十分广阔的社会和商业前景。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。