
图1:相移零电压开关全桥电路。
对功率的控制是通过设置两个相位之间的转移时间实现的,具体地说,短时间用于提供大功率,长时间用于提供小功率。这种技术允许控制电源相位。

图2:交换顺序。
研究图2所示的信号顺序就很容易理解Q3和Q4位置的器件在另外两个器件完成转换之后才改变它们的状态。换句话说,“前腿”中的器件Q3和Q4从通到断或从断到通的转换要先于器件Q1和Q2完成。基于这样的开关顺序,“前腿”中的器件将处于“后腿”看不见的自由相位状态。表1对这个开关顺序进行了总结。

表1:开关顺序总结。
这种控制技术可以减少开关损耗,因为整个工作过程是有管理的,只有当器件上的电压为零时才会发生从断到通的转换。图3显示了相移(P-S)零电压开关转换器上的典型波形。
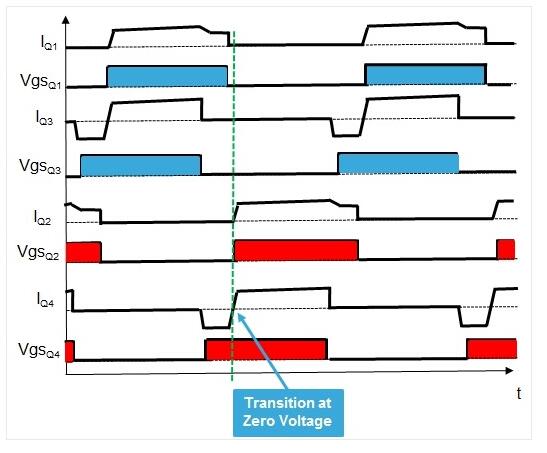
图3:P-S ZVS FB DC/DC转换器中的典型波形。
正如图3中强调的那样,如果重点关注Q4信号特别是它的电流,我们可以发现它由两部分组成。在部分中,从源极到漏极流经器件的电流被沟道和体二极管共享;在第二部分中,电流只在MOSFET沟道中从漏极流到源极。变压器上的电压一旦改变极性,电流就会发生反向。发挥这个顺序的优势,后腿器件Q2在这个相位期间进行开关,当其电压等于零时开始导通,从而实现ZVS转换。
必须特别注意Q4器件中的电流。当它的电流反向时,所施加的电压是低电压。由于电流由两部分组成,消除体二极管中的少数载流子的持续时间(trr)与典型测试相比是较短的。集中的少数载流子主要链接到重组期间。基于这个理由,通常针对这种拓扑推荐使用具有快速恢复时间的器件。下一节介绍由于这方面的原因可能引起的故障风险。
开关器件的故障风险
正如前文所述,在ZVS转换期间,MOSFET Q4的内部体二极管参与到了工作中,其导通时间被负载电平所固定。为了调节发送的功率,两腿之间的转移时间是可变的,因此体二极管导通时间将从大功率时的短时间改变到轻负载时的短时间。

图4:重负载时的典型波形。

图5:轻负载时的典型波形。
如果我们比较这两种情况可以清楚地发现,在图5所示的轻负载情况下,重组可用的时间要比图4所示情况短,甚至可能小于完成整个操作所需的时间。对这一瞬间重点观察可以发现,轻负载条件代表了针对这类风险重要的工作条件。
从图6可以看到,红色虚线显示的是不同的恢复时间,并因为使用不适当的器件导致的潜在风险。三条不同的线模拟了三种不同的恢复时间。其中两条线代表安全的情况,第三条线是可能发生故障的情况。在一种情况中,可用时间不足以完全恢复MOSFET中的少数载流子。
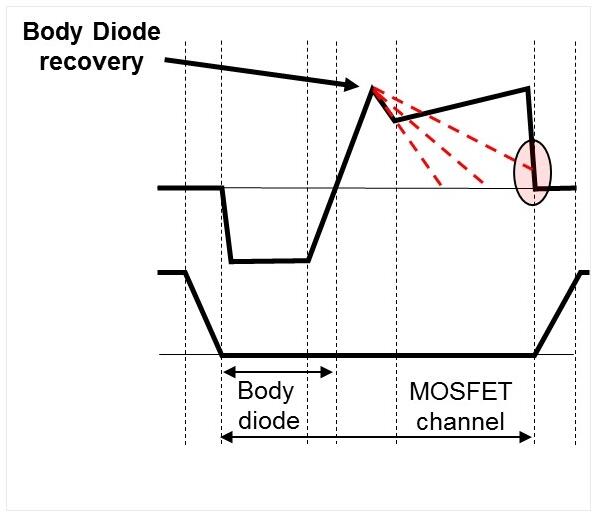
图6:前腿器件中的典型波形。
为了减少由于这种电气应力造成的故障风险,需要选用具有低trr和Qrr参数的MOSFET器件。有多种硅片技术可以用来解决ZVS拓扑中发生的上述故障模式,而且也有多款MOSFET器件具有快速反向恢复时间和较好的dv/dt耐用性,非常适合较高频率的ZVS全桥应用。这种选择通常也被SMPS制造商用来提高他们系统的可靠性。
图6显示了位于“前腿”的器件上的电流波形。相同的分析也可以应用于“后腿”器件。至于“前腿”中的器件,“后腿”器件中的导通相位包括了它们内部体二极管的恢复操作。在这种情况下,如果所选的器件与“前腿”相同,那么就看不出什么问题(图7),因为与前一种情况相比此时有更多的时间用于恢复相位。

图7:后腿器件上的典型波形。
本文小结
本文介绍了MOSFET器件用于相移ZVS转换器时可能产生的潜在风险。通过分析这种特定拓扑的转换顺序,文章着重强调了可能发生故障处的关键工作,并且指出拓扑中的位置对电气应力更加敏感。由于工作顺序的原因,将该拓扑分成标记为“前腿”和“后腿”的两个部分。文章对MOSFET的一些电气特性进行了研究,并形成了器件选择依据。器件必须考虑“前腿”要求的trr和Qrr约束条件。正确的选择可以提高系统的可靠性,降低故障风险,进而获得坚实耐用的设计。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。