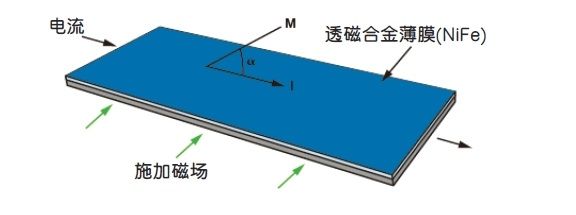
图1:AMR工作原理。
两个独立的惠斯登电桥配置以彼此呈45°的方式排列时,可实现角度传感器,其正弦和余弦输出取决于外部磁场方向。此配置可提供具有180°测量范围的传感器。
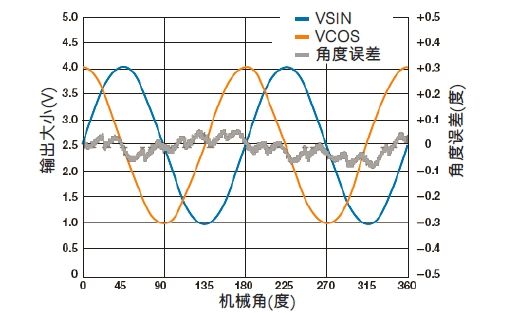
图2:360°机械旋转时的ADA4571误差(灰色)和输出波形(橙色/蓝色)。
图2显示了旋转磁场施加在360°机械旋转情形时ADA4571的典型高输出电平和角度误差。在微控制器中进行失调校正和反正切计算之后,典型误差小于0.1°。
传感器安装
对于大部分BLDC控制系统,根据可用空间和电机轴安装的便利性,配置和安装传感器有许多选择方式。图3显示了ADA4571的两个配置示例。
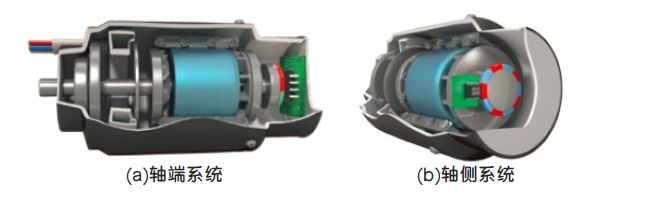
图3:BLDC系统与ADA4571 (a)轴端系统(b)轴侧系统。
典型的轴端配置包括一个安装在旋转轴上的直径磁化盘式磁体,该磁体安装在电机总成内部,如图3(a)所示。该磁体可提供一个穿过传感器平面的磁场。
在此配置中,无需使机械和电气组件接触即可直接读取转子角度。由于AMR技术不依赖磁场强度,因此能够耐受气隙变化。不依赖磁场强度还可增大机械容差并使磁体材料的选择简单化。
紧凑的轴端配置意味着传感器可直接安装在非常靠近电子控制装置(微控制器、MOSFET)的印刷电路板(PCB)上,从而能够限度减少信号路由并减小与恶劣电机环境的距离。
另一种可能的配置是图3(b)所示的轴侧系统。轴侧配置可用于待检测轴无法在端头安装磁体的应用。在此配置中,由磁极环提供激励,传感器和磁极环可安装在轴上的任意位置。典型应用包括电动助力转向泵或由于空间限制不能使用轴端的BLDC电机。
由于ADA4571能够提供低延迟和的位置反馈信息,因此可对电机各相的电流进行控制,从而使电机对动态负载做出顺畅响应,或在变化的条件下维持恒速。终结果就是更好的控制、的扭矩、更高的启动/停止效率,以及更佳的运行状况。
传感器设置和校准
要获得更高的,可在用户的生产线末端执行各类校准程序。可执行性失调校准,以消除正弦和余弦信号的初始失调。
图4显示了在室温下执行性失调校准后的典型性能。
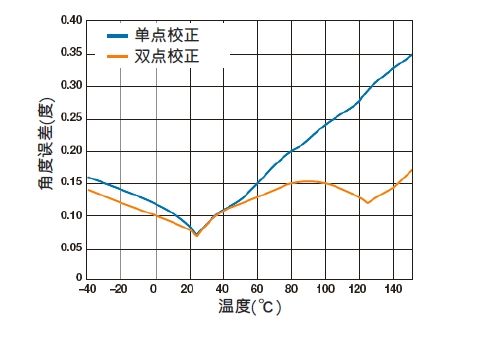
图4:单点和双点校正时典型角度误差与温度的关系。
由于传感器的失调漂移,角度可能随温度升高而下降,如在150°C时进行单点校正的情况,而双点温度校准则可提高性能。在这种情况下,可对失调和片内温度传感器的信息进行插值计算,并且可补偿随温度变化的失调。
自由运行应用中的BLDC系统可充分利用连续的失调校正技术,方法是计算指定时间内传感器输出的均值。微控制器中的动态失调补偿可在整个温度范围和工作寿命内实现非常高的。
与其他传感器技术(霍尔/GMR/TMR)不同,ADA4571无需执行额外的校准步骤,例如幅度校正或正交性校正。经过生产测试验证的幅度失配确保小于1%,而先进的传感器设计还可确保正交性。传感器还可忽略迟滞,从而获得高可靠性且的位置信息。
对于无需高、低性能且对成本敏感的应用,ADA4571可在不进行线路终端失调校正的情况下使用。这种情况下,ADA4571可确保具有小于5°的角度误差。这对于一些未校准的应用非常有用,因为主机控制器知道轴的位置,因此可优化启动状况。
结论
磁性位置传感器可为工业和汽车BLDC电机控制系统设计人员提供小型、稳定且易于组装的位置检测解决方案。ADI的新款ADA4571提供高速、高、经生产测试保证的全角度、集成式诊断功能以及低功耗工作模式,明显优于前几代磁性位置传感器。
为了确保器件的安装和校准设置简单方便并减少用户的软件开销,ADI投入了大量精力。因此,BLDC电机制造商可从非常的位置数据中受益,即使在高速应用中也可获得非常高的扭矩性能,除此之外,他们还能获得使用无接触式磁性检测技术的所有好处。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。