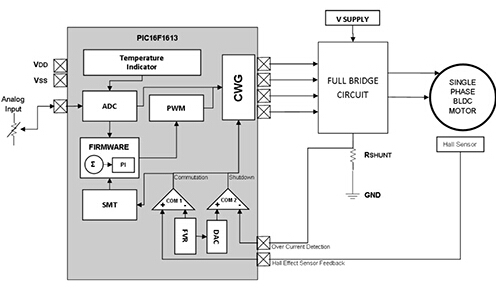
图1:单相BLDC驱动器框图
全桥电路为电机绕组供电,且由CWG输出进行控制。霍尔传感器用于确定转子位置。流过电机绕组的电流通过检测电阻Rshunt转换为电压,从而实现过流保护。转速以外部模拟输入作为参考。图2显示了电机驱动器控制框图;对于本应用,电机额定电压为5V,额定转速为2400转/分钟。电机驱动器电源电压为9V。参考转速可以是任一模拟输入。单片机的ADC模块具有10位分辨率以及多8个通道,因此适用于各类模拟输入。ADC模块用于提供参考转速和初始PWM占空比,从而根据参考转速源对电机转速进行初始化。
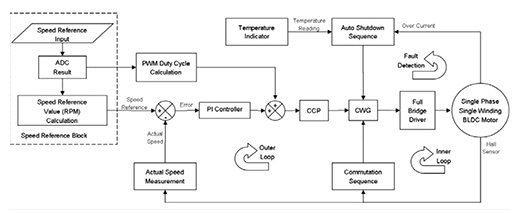
图2:电机驱动器控制框图
初始占空比可根据比例积分(PI)控制器的结果以及CCP中加载的新占空比值进行增减,相应的PWM输出用作CWG的初始源以控制全桥驱动器下桥臂开关的调制,从而控制电机转速。
内层回路
内层反馈回路负责控制换向。CWG输出用于控制定子绕组的激励,它取决于霍尔传感器输出的状态(霍尔传感器输出将通过比较器与FVR进行比较)。将使能比较器迟滞,以屏蔽传感器输出中的噪声。
比较器输出可在正向全桥模式与反向全桥模式之间切换,从而使电机实现顺时针或逆时针旋转。CWG输出将馈入全桥电路的开关的输入。要生成一个电气周期,必须执行正反向组合。电机机械旋转一周需要两个电气周期,因此必须执行两次正反向组合电机才能完成顺时针旋转。
全桥电路
图3所示的全桥电路主要由两个P沟道MOSFET(用作上桥臂开关)和两个N沟道MOSFET(用作下桥臂开关)组成。P沟道晶体管的主要优势在于可以在上桥臂开关位置轻松实现栅极驱动,从而降低上桥臂栅极驱动电路的成本。虽然上桥臂开关和下桥臂开关可同时开关(跨导),但应避免这种开关操作,否则将产生直通电流,导致驱动器元件损坏。为避免这种操作,可使用CWG的计数器寄存器来实现死区延时。这样可避免输出信号发生重叠,继而防止上桥臂和下桥臂同时导通。理想情况下,N沟道MOSFET和P沟道MOSFET应具有相同的导通电阻(RDSon)和总栅极电荷QG,以便获得的开关特性。因此,选择一对互补的MOSFET来匹配上述参数。但实际上,由于互补MOSFET的结构不同,无法达到此要求;P沟道器件的芯片尺寸必须是N沟道器件的2到3倍才能匹配RDSon性能。但是,芯片尺寸越大,QG的影响也越大。因此,选择MOSFET时,务必先确定RDSon和QG二者中哪个对开关性能的影响更大,然后再相应地进行选择。

故障检测
若转矩负载超出允许的电机转矩负载值,可能会导致电机停转,从而使全部电流流过绕组。因此,为保护电机,必须实现过流和停转故障检测。要实现过流检测,可在驱动电路中添加Rshunt,该电阻会根据流过电机绕组的电流提供相应的电压。电阻两端的压降随电机电流线性变化。该电压将馈入比较器的反相输入并与参考电压进行比较,参考电压基于Rshunt电阻与允许的电机停转电流值之积。参考电压可由FVR提供,并可通过DAC进一步缩小。这样便可以使用非常小的参考电压,从而将电阻保持在较低水平,进而降低Rshunt的功耗。如果Rshunt电压超出参考电压,比较器输出会触发CWG的自动关断功能,并且只要故障存在,CWG的输出便会保持无效状态。
过温故障可通过器件的片上温度指示器进行检测,温度指示器的测量范围为-40?C至+85?C。指示器的内部电路会随着温度的不同而产生不同的电压,然后通过ADC将此电压转换为数字量。为提高温度指示器的度,可实施单点校准。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。