基于双DSP+FPGA的三相逆变器的设计与实现
三相逆变器作为现在一种常用的电力电子设备,对输出电压控制系统需同时实现两个目标:高动态响应和高稳态波形。诸如PID、双闭环PID、状态反馈等控制方案,虽然能实现高动态特性,但是不能满足高质量的稳态波形。
本文利采用双闭环PI和重复控制相结合的控制方案,首先用双闭环PI控制算法,得到高动态特性的三相交流电,不过不能满足高质量的稳态波形,因为用电压质量要求比较高的非线性负载———镇流器是电感式的钠灯作为三相逆变器的负载时,钠灯不能稳定的工作(会高频率地闪烁),针对这一问题,在双闭环PI的基础上加重复控制补偿,建立MATLAB 仿真,并在双DSP+FPGA 硬件架构中高效的实现。实验结果表明,加上重复控制补偿后,钠灯能够稳定的工作,三相逆变器的稳态性能得到了很大的改善。
1 三相逆变器数学模型的建立
三相LC逆变器的主电路拓扑如图1,组成部分主要有三相逆变桥、三相滤波电感L、三相滤波电容C 。
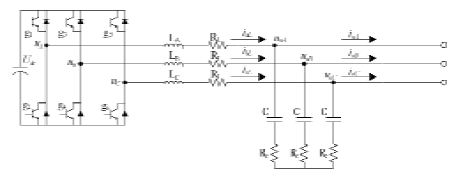
图1 LC 三相逆变器的主电路拓扑
定义三相逆变器负载侧输出电压为uoA、uoB、uoC,输出电流为ioA、ioB、ioC,三相逆变器电感L 侧输入电压为uA、uB、uC,输出电压为uoA、uoB、uoC,流过电感的电流为iaL、ibL、icL。
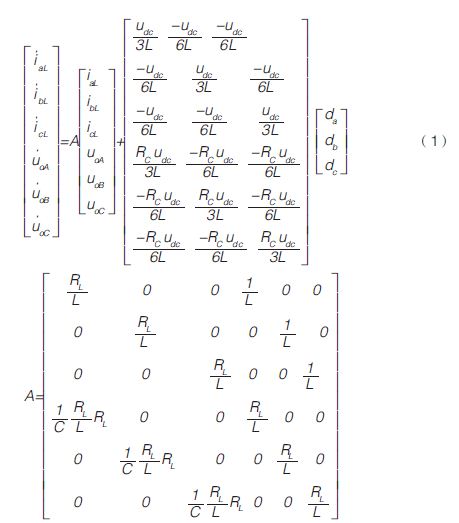
以电感电流和输出电压为状态变量,建立在三相静止坐标系中的状态空间表达式如下。
状态方程为:
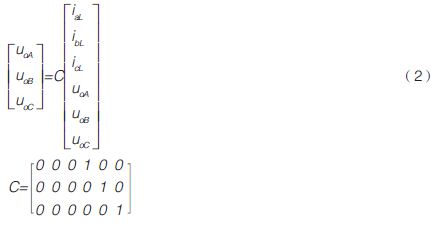
输出方程为:
dk-调节器输出的调制信号。
以上为三相逆变器的静止坐标系中的数学模型,下面讨论其解耦模型。
引入如下三相静止坐标系到两相静止坐标系的变换关系式:
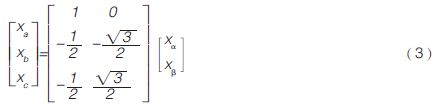
将式(3)代入式(1),即可得到在两相静止坐标系下控制对象的传递函数表达式如下:

从上面的控制对象的传递函数表达式可知,α轴和β轴已经完全解耦,各自等效为单相半桥逆变器。
从上面的分析可以看到:①在两相静止坐标系下,三相逆变器是完全解耦的,可等效为两个单相半桥逆变器。②三相解耦后的模型与单相逆变器模型相同,所以三相逆变器的控制的分析与设计方法可以借鉴单相逆变器。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。