1.3 超声波传感器模块
超声波模块由发射电路和接收电路组成,如图3所示。其中发射电路由Em78p153单片机、MAX232及超声波发射头T40等组成,接收电路由TL074运算放大器及超声波接收器R40等组成。
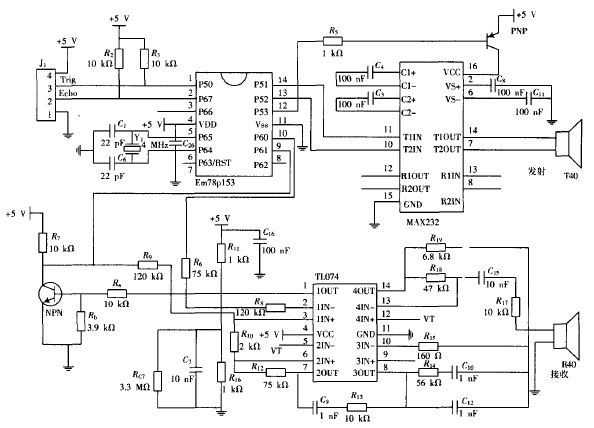
图3 超声波传感器
探测时,超声波发射器发射出长约6 mm,频率为40 kHz的超声波信号。此信号被物体反射回来由超声波接收器接收,接收器实质上是一种压电效应的换能器。它接收到信号后产生mV级的微弱电压信号,电压信号再在控制模块中转换为数字信号。设超声波脉冲由传感器发出到接收所经历的时间为t,超声波在空气中的传播速度为c,则从传感器到目标物体的距离D可用D=ct/2求出。
1.4 红外传感器模块
红外测距模块采用夏普GP2YOA21红外测距传感器,夏普GP2YOA21型红外测距传感器是基于位置敏感传感器PSD(Position Sensitive Device)的微距传感器,捕捉的是光信号并且有着基于Lucovusky方程的电路设计,其有效的测量距离为80 cm。
红外测距其优点是无盲区、测量高、反应速度快,但其缺点受环境影响较大、探测距离较近。因此本文设计了基于多传感器信息融合的智能小车避障系统,采用红外传感器与超声波传感器互补,使机器人具有的感测范围。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。