摘要:采用无差拍电压空间矢量控制法来分析有源滤波器的滤波性能,给出该方法的控制策略,包括空间矢量脉宽调制(SVPWM)算法以及无差拍原理。该方法可以用来抑制和消除采样与计算方法的延时对控制的影响。Matlab仿真结果表明:SVPWM调制与无差拍控制结合用于有源滤波控制可以明显改进补偿的动态性能,提高滤波效果。实验结果证明该方法可行,且具有较好的实时性。
0 引言
有源电力滤波器(Active Power Filter,APF)作为一种用于动态抑制谐波的电力电子装置,其能够同时补偿多次谐波电流,能实时控制、自动跟踪非线性电流并加以控制,有较快的动态响应速度,且具有改善三相不平衡度的优点。对于有源滤波器谐波电流检测与补偿电流的发生是其极为关键的技术。
有源电力滤波器的电流控制一般采用PWM(PulseWidth Modulation)模式,目前常用的PWM 控制方式有滞环电流控制(Current Follow Pulse Width Modulation,CFPWM)、三角波电流控制(ΔPulse Width Modulation,ΔPWM)和电压空间矢量脉宽调制(Space Vector PulseWidth Modulation,SVPWM)三种技术。对于SVPWM 其控制方法的优点主要在于:提高逆变器直流侧电压的利用率,减小开关器件的开关频率以及减少谐波成分,而且此方法更易实现数字化。因此,逆变电路控制常采用此种方法。在APF的应用中,SVPWM常与滞环比较,PI调节器以及无差拍等结合应用。本文采用无差拍SVP-WM 控制策略,对APF 的电流进行补偿控制,以获得较好的动态补偿效果。
1 电力有源滤波器谐波检测方法
有源滤波器的谐波电流检测方法由时域和频域检测法构成。时域检测法主要分为:有功电流分离法和基于瞬时无功功率原理的p-q 法,ip-iq法以及d-q 法等。频域检测法主要有FFT法和谐波滤波器法等。
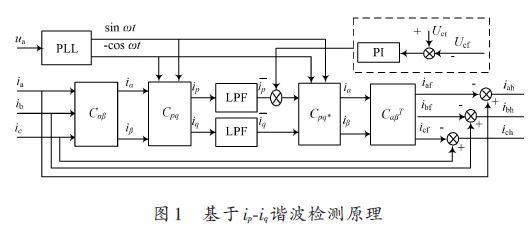
对于本文研究主要是采用ip-iq法来对电力有源滤波器进行分析研究,由图1可看出其原理。图中虚线框内为直流侧电压反馈控制部分,正余弦信号sin ωt 和-cos ωt 由锁相环PLL发生电路产生。其中sin ωt 与a相输入电压ua同相;逆变电路直流侧电压的给定值为Ucr,Ucf 是反馈值,将这两路信号之差经过PI调节器进行调节,所得到的Δip叠加到瞬时有功电流的直流分量中,经过运算得出指令电流ih 中所含基波有功电流,从而令APF直流侧与交流侧进行能量互换,从而将Uc调整到给定值。对于电力有源滤波器而言,滤波器逆变器直流侧信号与交流侧信号的能量交换是本文研究的关键。
2 无差拍控制简介
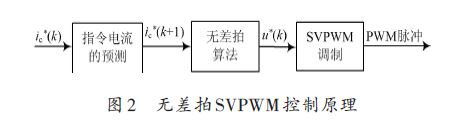
SVPWM 控制是用指令电流ic*(k) 代替补偿电流ic*(k+1)使k 时刻的补偿电流在k+1时刻完全跟踪上指令电流,但这样会存在一拍的滞后。而基于SVPWM的无差拍控制则在k 时刻预测出k+1时刻的指令电流值,并以此代替补偿电流,通过SVPWM控制算法产生PWM 脉冲信号以控制变流器开关器件的通断,从而使每一时刻输出的补偿电流等于其指令电流,实现了实时控制。无差拍SVPWM的控制原理如图2所示。
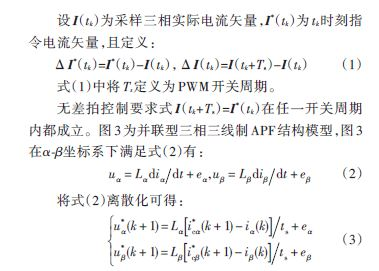
式中:ts为采样周期;ic*(k+1)和u*(k+1)分别为k+1采样时刻有源电力滤波器的指令电流与参考电压。
为了能够在k 时刻得到u*(k+1),须在采样时刻的基础上提前预测出ic*(k+1)。再算出u*(k+1),通过SVPWM方法得到合适的有源滤波器逆变器脉冲控制信号,从而达到电流跟踪控制目的。
3 SVPWM原理与实现
3.1 逆变器矢量的定义
图3为并联型APF拓扑结构图,其3个桥臂分别定义为a,b,c.

定义开关变量用Sa、Sb、Sc来表示,用“1”表示同一桥臂的上桥臂开关导通,用“0”表示同一桥臂的下桥臂开关导通,如“100”表示a相的上桥臂导通、b相的下桥臂导通、c相的下桥臂导通。则三相电压可表示为:
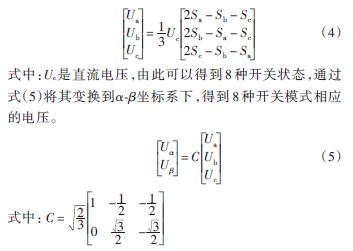
根据开关器件的导通状态可得出8种开关状态,其在在α-β坐标系上的分布如图4所示。

3.2 SVPWM算法实现
(1)参考矢量Uref扇区的判定
图4把6种有效状态所围成的6边形分成6个扇区,分别称为I、Ⅱ、Ⅲ、Ⅳ、Ⅴ和Ⅵ。
通过α-β坐标系中的Uα与Uβ进行运算得出Uref所在扇区N 的值。通过3 2 的变换等式如式(6)所示。
由式(6)得出,矢量Uref可通过Uα和Uβ来表示。定义变量A,B,C:若U1>0,A=1 否则A=0;若U2>0,B=1,否则B=0;若U3>0,C=1,否则C=0.通过将A,B,C 的数值带入到式N=A+2B+4C 中得到所对应的扇区。
(2)参考矢量Uref的基本矢量作用时间计算
在图4中,设参考矢量Uref位于六边形扇区Ⅲ中,相邻的矢量为U1(100)、U2(110),设t1与t2分别为其作用时间,T1为SVPWM的调制周期1.通过伏秒平衡原则,可以得出:
在实际情况中,系统中的电流有可能发生较大的突变现象,使得数字电流环中的参考电压矢量超出变流器输出的电压,因此判断其是否饱和是确保合适的空间矢量调制方法。若t1+t2≤Ts,则无需纠正,有:
式(12)中的T0为零矢量的作用时间。
(3)变流器触发方案
选择适当的空间基本矢量作用时间切换点调制方案是脉冲产生的前提条件。本文采用对称七段式PWM方式,即以零矢量000作为开关周期的起始与结束,111为中间矢量,在实际系统中应当尽可能地减少开关状态变化时所引起的开关损耗,因此每一个开关状态都的遵守一个原则:每次开关状态切换时只有一个开关运作。
调制顺序为:000→100→110→111→110→100→000,图5为调制后的变流器触发脉冲信号。

4 基于Matlab 的仿真
通过Matlab 仿真,对无差拍SVPWM 控制策略的APF 建立仿真模型,仿真模型参数设计为:电抗L 为2 mH,线电压380 V的三相交流电源,APF直流侧电压为800 V,负载为阻性负载与三相不控整流桥,其阻值为5 Ω,开关频率8 kHz.电力有源滤波器Matlab 仿真如图6所示,其仿真波形如图7所示。


仿真结果表明,a相电流电流通过APF谐波补偿后基本保持正弦。由此得出,APF具有较好的电流跟踪与补偿的效果。
5 实验结果
在APF实验中,采用DSP来实现无差拍SVPWM 控制策略,并将其应用于非线性负载中进行谐波补偿。实验设计参数:电源为线电压为380 V 的交流电,交流侧为电阻为5 mΩ,连接电抗2 mH,非线性负载侧含有阻值5 Ω的电阻负载,在实验系统中测得滤波器直流侧电压为800 V,采样频率为10 kHz.图8为APF的实验波形。
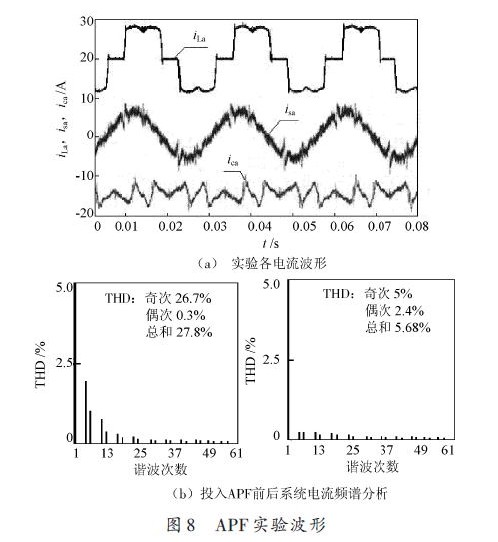
通过实验波形与频谱图分析可以得出,当APF接入系统后,由图8(c)可以看出无差拍SVPWM控制算法能够取得较好的谐波电流跟踪和补偿的能力。由图8(d)APF投入后电流的THD由26.7%变为5.6%,更进一步证明了无差拍SVPWM 控制策略拥有较好的电流跟踪效果。
6 结论
本文采用无差拍SVPWM 作为滤波器的控制策略进行研究,通过预测算法预测出补偿点流的参考值,而后再计算得出下一时刻的输出电压参考值,通过空间电压矢量调制得出PWM 脉冲信号,实现补偿电流得到较好跟踪控制的目标。通过仿真与实验该方法的可行性。仿真与实验表明此方法能够实现对系统补偿电流的跟踪控制,而且还具有良好的动态补偿性能。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。