摘要:现代电机控制技术日新月异,发展很快.在从事研制开发的多个型号课题中应用了直流电动舵机,而其部分直流电机控制方式又多采用脉冲调宽方式,对电动舵机脉冲调宽驱动芯片UC2637工作方式中的几种情况给予讨论,希望对其能够灵活运用,并可推广到其他的使用情况中去.
0 概述
直流电机或直流舵机在许多领域中都得到广泛应用.而在现代直流电机控制领域中,脉冲调宽驱动方式(PWM)得到越来越广泛的应用.在笔者所从事的某型号无人机伺服回路的研制中采用了美国Unitrode 公司推出的开关模式直流电机控制芯片UC2637.该芯片原理简单,使用方便,可靠性高.PWM波的工作频率设置在20 kHz左右.这种方式与线性功率放大电路及电平控制驱动方式(bang.bang)相比有许多优点:
首先,这种控制方式工作在开关状态,自身效率高,功耗小,在稳定工作时发热少.
其次,这种控制方式可以近似认为是一个比例环节,工作时线性度较好.
再次,由于这种控制方式在高频方波状态下工作,含有直流分量和各次谐波分量,使电机在谐波作用下做小振幅高频振动.可以有效清除电机死区,加快电机启动速度.且电机时间常数又远大于脉冲调宽方波的载波周期,所以电机在谐波作用下的高频振动振幅近似为零.
1 脉冲调宽驱动芯片UC2637 工作原理简述
1.1 UC2637组成
控制器UC2637 基本上由4 只输入分压电阻.2 个比较器,1 个三角波发生器.控制逻辑组成.如图1所示.
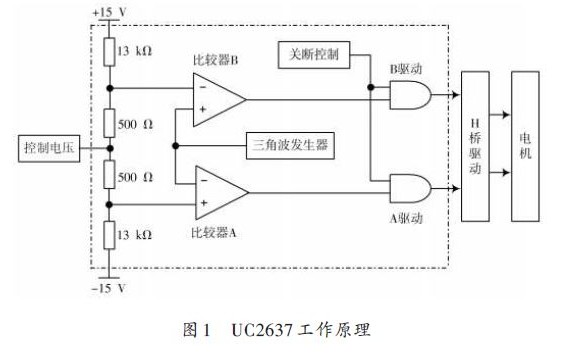
1.2 PWM控制电路工作原理
如图2所示,三角波发生器产生出一个线形度很高的三角波送至比较器A的负端和比较器B的正端(为分析方便假设其峰.峰值为±5 V).假设初始状态时500 Ω关于输入电压上下对称的,每个比较器输出占空比为50%的方波,如图2(a)所示.

当输入电压上升到为2.5 V时,使得1/4的三角波高于输入电压,3/4的三角波低于输入电压,比较器A就将产生占空比75%的方波,B 将产生占空比25%的方波,如图2(b)所示.反之,当输入电压下降至-2.5 V时,比较器A 就将产生占空比25%的方波,B 将产生占空比75%的方波.当电路接上500 Ω电阻以后,输入电压从比较器上来看是经过轻微矫正过的,比较器A上输入电压比实际稍低,比较器B上输入电压比实际稍高.使得A.B输出方波的占空比比原来均稍小,简单来说就是为所有的管子提供了死区,并且总的死区时间是不变的(见图3).这样,就产生了两组方波去控制驱动级H桥电路.

1.3 H桥工作原理
如图4所示,H桥由2只N沟道MOSFET和两只P沟道MOSFET组成.其中,1#和4#开关管同时导通时2#和3#开关管同时关断,这样电流经电源流过1# MOSFET,电机,4# MOSFET到地,电机实现正转;反之,2#和3#开关管同时导通时1#和4#开关管同时关断,这样电流经电源流过2# MOSFET,电机,3# MOSFET 到地,电机实现反转.当PWM 方波处于死区时,4 只开关管同时关断,电机此时完成正反转切换.
综上所述,PWM控制方式就是用一组频率一定(一般为几十kHz到几百kHz不等)占空比可调的方波控制直流电机正反转.

2 脉冲调宽驱动方式几种形式及应用
笔者在PWM控制电路多次调试过程中,发现了一个较为有趣的现象.如前图3所示,比较器A.B的输入电压同原输入电压相比均有微小变化,使得比较器A.B的输出方波占空比比原来均稍小,简单来说就是为所有的管子提供了死区.这样做的好处是为了H 桥电路的MOSFET不至于在正反转切换的过程中上下直通,形成短路(这在PWM 电路中是务必要注意的).一般情况下,多将死区的时间设置为恰好不使MOSFET上下直通或稍长.为满足伺服系统所提要求,在实验中曾经多次调整死区时间,发现死区时间长短不同对PWM 控制性能有较大影响.现将其对控制性能的影响分析如下:
首先假设控制输入电压为Ui,三角波周期为T,峰值为±5 V.
2.1 占空比各占45%左右的情况
占空比各占45%左右的情况工作如图3所示,是为常用的一种控制方式.设置这种工作方式的方法如图1中所示,将输入端的4只分压电阻参数如图设置即可.则:

分析其工作常态即输入电压为0 V 时的情况.此时,由上述计算公式可算得比较器A.B输出方波占空比各为45%左右,参照图4可知1#,4# MOSFET导通时间为45%×T;2#,3# MOSFET导通时间同样为45%× T.这样,作用在电机两端的正反向电压平均值相等,电机静止.当输入电压大于0 V 时比较器A 输出占空比加大而比较器B输出占空比减小,作用在电机上平均电压为正,电机正转;反之,则反转.
通过分析及实验发现这种工作情况的显着优点是:
当控制电路输入电压为0 V时,电机在谐波作用下做振幅极小的高频振动.可以有效清除电机死区,加快电机启动速度.
但同时发现其也有显着缺点:电机在停转时,依然有功率密度较高的电压作用其上,若电机内阻稍大,经过长时间工作,在停转时电机也明显发热,升温较快,产生大量无用功.于是为解决这个问题,经反复分析实验,找到下面的方法.
2.2 占空比各占15%左右的情况设置这种工作方式的方法如前图1中所示,将输入端的2 只500 Ω分压电阻参数重新设置为5 kΩ即可.
这种工作情况如图5所示.

同样分析其工作常态即输入电压为0 V 时的情况.此时,由上述计算公式可算得比较器A.B输出占空比各为15%左右,这样,作用在电机两端的正反向电压平均值同样相等,电机静止.
但这种工作方式同前一种不同之处在于:电机停转时,作用在电机上电压为一系列脉冲电压.于是,在稳态时电机发热明显减小,PWM 电压所做无用功减小.但高频方波清除电机死区,加快电机启动速度的功能却明显减弱了.
由上述分析可知,种控制方式适用于电机内阻较小,控制线形度要求极高的情况.第二种控制方式适用于电机内阻较大,控制线形度要求不高的的情况.但在有些时候还需要利用电机的死区工作方式,同样通过设置图1中输入端的分压电阻即可.
2.3 死区工作方式
设置这种工作方式的方法如前图1中所示,将输入端的2 只500 Ω分压电阻参数重新设置为13 kΩ即可.
这种工作情况如图6所示.

同样分析其工作常态即输入电压为0 V时的情况.
这时两比较器输入电压均高于三角波电压,两比较器输出同时为低,无电压作用于电机两端,电机停转.当输入电压微小变化时(无论正负),只要仍使两比较器输入电压高于三角波电压,电机仍然停转(见图6(a)).这样就实现了死区控制,即输入电压在0 值附近一定区间变化,而被控对象不响应.此死区大小可通过调整图1中4只分压电阻确定.
当输入电压变化超过死区范围后,A或B比较器中的一个开始工作,此时作用在电机上的是一串单边方波,电机开始转动.
3 结语
通过上述分析讨论,发现在PWM 控制芯片中用于防止H桥上下直通的设置死区的分压电阻可灵活运用,产生不同的控制方式.此方法可推广到其他PWM控制电路,具体采用那种方式则需视被控对象或控制要求不同而定.同时通过此次工作另一点心得是,在分析实验中要务必扎实全面,就常有意外收获.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。