1 概述
本文采用TI公司推出的240XDSP作为无刷直流电机全数字控制,组成的伺服系统只需要很少的系统元件。数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。德州仪器、Freescale等半导体厂商在这一领域拥有很强的实力。DSP(demensional stable polyester),也称高模低收缩聚酯纤维,主要表现在为高强度,高模量,低收缩,低伸长等物理指标。尺寸稳定性是聚酯骨架材料的一项重要特性,与轮胎的生产和成品质量密切相关,早期的标准型聚酯帘线由于尺寸稳定性差而使轮胎质量不尽如人意。20世纪80年代开发成功的高模量低收缩型聚酯纤维在尺寸稳定性方面有了质的突破。近年来,国内外的轮胎制造厂在使用尺寸稳定型聚酯帘线(或称HMLS聚酯帘线)作为轮胎胎体骨架材料后均发现,这种聚醋纤维对轮胎性能的提高及轮胎优质轻量化均发挥了很大作用。
2 硬件介绍
TMS320LF2407A的内核是TMS320C2XX(图1),内部采用了哈佛结构,流水线作业,在20MHz的时钟频率下,指令周期仅为50ns,且多数指令都能在一个指令周期内完成。其中央算术逻辑部分包括32位中央算术逻辑单元(CALU),32位累加器,CALU的输入/输出数据定标移位器,16位×16位乘法器,乘积定标移位器,数据地址发生逻辑(包括8个辅助寄存器和1个辅助寄存器算术单元(ARAU),程序地址发生逻辑。当处理器连续工作时,还能同时执行:a、经由串行口的数据接收和发送;b、内部定时器减数;c、产生三相脉宽调制(PWM)波形;d、采集4个模拟信号;e、看门狗定时器减数。它还包含有其它系列的DSP芯片所没有的双10位模数转换器、基于PWM控制的管理器。脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术广泛应用的控制方式,也是人们研究的热点。由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。

图1 TMS320Lx240x系列DSP控制器总体结构
3 DSP控制流程
图2是用TMS320LF2407A实现三相无刷直流电动机调速的控制和驱动电路。本设计采用TMS320LF2407A微控制器为系统控制器,以功率MOSFET场效应管为功率变换元件,任意时刻电机只有两相导通来控制换流元件,采用PWM方式来控制电机的转矩和转速。在这里,三个位置间隔120O分布的霍尔传感器H1,H2,H3经整形隔离电路后分别与TMS320LF2407A的三个捕捉引脚CAP1,CAP2,CAP3相连,通过产生捕捉中断来给出换相时刻,同时给出位置信息。

图2 用TMS320LF2407A实现三相无刷直流电动机调速的控制和驱动
从理论上来看,直流无刷电动机的速度和转矩控制主要依据如下的转矩和反电动势工程计算方程
其中,N为直流无刷电动机定子每相线圈数, 为转子的长度,r为转子的内径,B为转子的磁通密度,为电动机的角速度,i为相电流,L为相感抗,为转子的位置,R为相阻抗。
从方程可以看到,反电动势与电动机的转速成比例,而转矩与相电流也几乎势成比例的。根据这些特点,在方案中采用了图3所示的控制策略。给定转速与速度反馈形成偏差,经速度调节后产生电流参考量,它与电流反馈量的偏差经电流调节后形成PWM占空比的控制量,实现电动机的速度控制。电流的反馈是通过检测电阻上的压降来实现的。
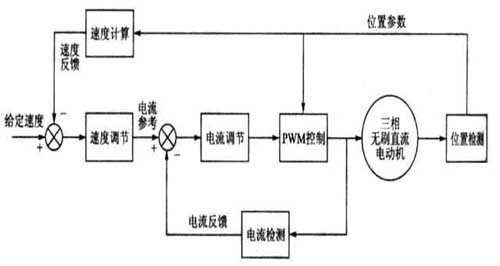
图3 三相无刷直流电动机的速度和电流控制
4 软件控制
系统采用PWM控制算法,电机输入直流电流且每一时刻只有两个功率管导通,从2407来的PWM控制信号直接连至驱动器,驱动器的输出再连至功率MOSFET管的控制极。2407的CPU时钟频率是20MHz,PWM频率是20kHz。
4.1相电流检测
TMS320LF2407A接受到电阻上放大的压降信号后,经由A/D转换后得到电流信号。在转换结束时,A/D模块向CPU发送一个中断请求信号,等待CPU处理。每隔50us,DSP控制器对相电流进行采样,从而实现20kHz的电流调节环。
4.2转子位置和速度检测
掌握好恰当的换相时刻,可以减小转矩的波动。位置检测不但用于换相控制,而且还用于产生速度控制量。
位置信号是通过3个霍尔传感器得到的。他们的输出信号相差1200。每个机械转有6次换相,通过将DSP设置为双沿触发捕捉中断功能,可以获得正确的换相时刻。
位置信号还可以用于产生速度控制量。只要测得两次换相的时间间隔 ,就可以根据下式计算出两次换相时间的平均角速度。
两次换相的时间间隔可以通过捕捉中断发生时读定时器2的T2CNT寄存器的值来获得。
4.3电流和速度调节
相电流的调节可以通过调节载频为20kHz的PWM信号的脉冲宽度来实现。
Ierror="Iref" - Imea
cyclenew=cycleold+IerrorK
如果cyclenew>=Timer_period, 那么cyclenew=Timer_period
如果cyclenew>Timer_period,那么cyclenew=0
其中Iref—用户想要的参考电流;
Imea——实际测得的相电流;
Ierror——要调节的相电流误差;
速度调节采用PI算法,以获得的动态效果。计算公式如下:
式中Iref-速度调节输出;
ek -第k次速度偏差;
Kp -速度比例系数;
Ki -速度积分系数;
T -速度调节周期;
试验证明能产生很好的三相PWM控制波形。图5为产生的PWM波形。
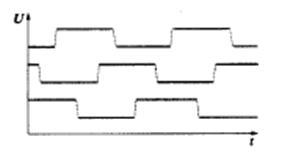
图5 利用DSP控制三相无刷直流电动机产生的PWM波形
前面所叙述的系统初始化、位置信号检测、PWM信号输出等软件模块,可以实现一个基本的具有位置传感器的三相直流无刷电动机速度控制系统。然而为了建立一个更完善的系统,还需要增加一些功能模块,如调节电动机转速的控制模块、保存系统运行数据的数据记录模块等,TMS320LF2407与pc机之间采用的通讯是采用RS-485进行半双工的接口电路。
5 结束语
本文作者创新点:将工业控制中普遍使用的PI算法在DSP上实现PWM波形输出,由于单片机自身性能的限制,已难以满足高速度,高的电机控制要求,而用DSP则很好的实现用于直流无刷电机控制的PWM波形输出。DSP(digital signal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。其工作原理是接收模拟信号,转换为0或1的数字信号。再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。它的强大数据处理能力和高运行速度,是值得称道的两大特色。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。