1、系统总体设计方案
1.1 系统的拓扑结构
CAN(Controller Area Network)即控制器局域网,是目前广泛应该的总路线之一。CAN总线通信距离限制小,它的直接通信距离可达10km,通信速率可以达1Mb/s(此时距离长为40m),节点数可多达110个。因此它特别适合于工业远程过程监控设备的互联和电网络设备的调试和维护。基于CAN总线的分布式控制系统的一般组成模式如图1所示。上位机PC机通过RS-232连接到总线上某一智能节点。可以对安装在现场某些节点的程序进行远距离在线升级和改变某些功能,因此利用CAN总线进行单片机的在线编程就显得非常必要。
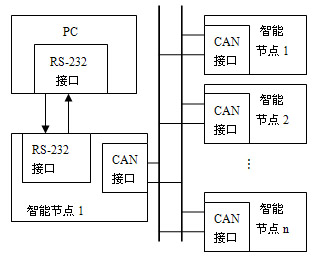
图1 基于CAN总路线的分布式控制系统
根据图1所示的CAN总线分布式系统的结构,在线编程采用主从结构。智能节点1为主节点,其它节点为从节点。节点采用ATMEL公司推出的AVR系列单片机MEGA8,内含8K FLASH程序存储器,1K的内部SRAM,512字节的内部EEPROM.为了便于升级,除了提供ISP即在线编程功能(In System Programming)以外,还提供了BOOT引导功能,为实现IAP即在应用中编程(In Application Programming)为系统升级提供了可能。
1、2 节点升级过程
主节点在编程监控模式下,接收PC机发送的"编程"命令,若编程节点为主节点,则程序可以通过RS-232到主节点,主节点接收编程数据,完成 FLASH的在线编程,此时,从节点分别执行各自缺省的应用程序。若编程节点为从节点,则主节点就通过CAN总线进行广播,全部从节点监控包括被选择节点 ID号在内的"编程初始信息",并与各自的节点ID进行比较,被选择的从节点与主节点和PC机建立编程通信连接,其它从节点继续运行其缺省应用程序,从而实现了在线升级功能。可见,在从节点编程模式下,主节点在PC机的RS-232总线与从节点的CAN总线之起着路由器的作用。
1、3 CAN总线系统智能监控节点
CAN总线系统智能监控节点由5部分组成:微控制器Mega8,并串转换电路,独立CAN控制器SJA1000,CAN总线驱动器TJA1050和高速光电耦合6N137.如图2所示
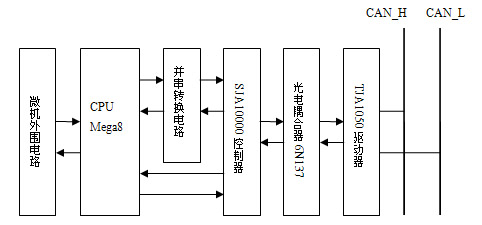
图2 CAN智能监控节点硬件原理图
为了提高稳定性和安全性,在SJA1000的TX0和RX0与TJA1050的TXD和RXD相连时,采用了高速光电耦合6N137,并且两个光电耦合器各自连接两个完全隔离的电源,这样就很好地实现了总线上各CAN节点间的电气隔离。在SJA1000与Mega8通信中,中间加入了一个并串转换电路。除了给Mega8留出更多的引脚用于外围电路外,更重要的是传输多位数据时,可以通过并串转换电路,连接到Mega8单片机的通用同/异步串行接口 USART的RXD与TXD引脚。把接收过进来的数据送入USART数据寄存器UDR中,通过ID后,进入FLASH编程监控程序,进行自编程修改,达到升级的目的。
2、MEGA8单片机升级功能
2.1 引导加载自编程功能
ATmega8具备引导加载支持的用户程序自编程功能(In-System Programming by On- chip Boot Program),它提供了一个真正的由MCU本身自动和更新(采用读/写同时"Read-While-Write"进行的方式)程序代码的系统程序自编程更新的机制。使用该功能时,MCU可以灵活地运行一个常驻Flash的引导加载程序(Boot Loader Program),实现对读取代码,或者从程序存储器中读取代码,然后将代码写入(编程)到Flash存储器中。引导加载程序有能力读写整个Flash存储器,包括引导加载程序所在的引导加载区本身。引导加载程序还可以对自身进行更新修改,甚至可以将自身删除,使系统的自编程能力消失。基于这个因素,使得在线升级成为了可能。引导加载程序区的大小可以由芯片的熔丝位设置,该段程序区还提供两组锁定位,以便用户选择对该程序区的不同级别的保护。
2、2 MEGA8的BOOT介绍
由于MEGA8具有IAP可在应用中升级的功能,本系统在软件设计上采用了BOOT引导功能。主程序采用C语言编写,BOOT程序则采用了汇编编写。目的是为了提高速度,设计中放弃了ATMEL提供的AVRPROG烧录软件,另外采用了一个烧录速度较高的ID通讯协议,在程序代码量比较大的时候,具有更明显的速度优势,并且也便于用户二次开发。
MEGA8的引导功能可通过相应的熔丝位来确定,BOOT引导程序的入口、BOOT区的大小可以通过烧录单片机的BOOTSZ1、BOOTSZ0两个熔丝位来确定。单片机复位后向量入口也是通过烧录单片机的BOOTRST熔丝位来确定。另外,单片机在执行IAP编程时需要用到 Store Program Memory Control Register(SPMCR)寄存器。
SPMCR寄存器包含了页擦除,页写入,BOOT区加密设置,页填充及页的RWW(Read While Write)等功能的设置。需要注意的是在执行每个功能时,都需要设置SPMEN标志,在随后的4个时钟周期内运行SPM指令,该标志会在SPM执行完成后自动清零。函数如下:
Do_SPM:
Wait_SPM: ; 等待页操作完成
in templ,SPMCR
sbrc templ,SPMEN
rjmp Wait_SPM
out SPMCR,temp
spm ; 执行SPM指令
.dw 0xffff
nop
ret
有了以上的函数,就可以很容易的进行页擦除、页写入、页填充等程序的设计了。比如需要执行页擦除指令,则首先要将需要擦除的页地址写入Z寄存器,然后置位SPM的PGERS(页擦除位)和SPMEN(SPM允许位),然后再调用Do_SPM函数即可。程序如下:
……
ld temp,y+
mov zl,temp ; Z指针地址赋值
ld temp,y+
mov zh,temp
ldi temp,(1<
rcall Do_SPM ; 执行页写入
……
3、BOOT程序介绍及流程图
Mega8单片机上电后设置冷启动标志,而热启动入口则设置热启动标志。然后初始化堆栈、串口以及必要的I/O状态等。初始化完成后,如果BOOT程序检测到热启动标志则直接进入烧录状态;如果为冷启动标志则继续检测位是否允许(本设计通过PB0开关选择),如为高电平则进入烧录状态,如为低电平则进入用户程序。
BOOT引导程序在设计时提供了两个入口,一个是系统复位时的冷启动入口,另一个是用户程序在运行时进入升级程序的热启动入口。BOOT程序主要包括烧录子程序、串口发送、串口接收、引导主程序等。
串口发送采用了查询发送完成标志。这样当该标志被设置时,证明串口的停止位已经发送完成,这对于CAN总线通讯非常有用。烧录程序主要使用"SPM" 指令,该指令完成对MEGA8的烧录等功能。而读取MEGA8的指令则使用"LPM".由于擦除,页填充,写入,读出等基本命令单片机都已解释完成,因此所有过程都可以由计算机端程序进行控制。
程序开始时,计算机端发送命令,先对单片机的页进行擦除,然后接收一帧数据,接收完毕后执行页写入命令,写入完成再进行读出进行校验,如果校验无误再继续写入下一页,直到所有页都写入完毕,即完成过程。如果传输或页校验出现错误,程序会连续进行5次测试,如再仍不成功,则认为本次失败。主程序流程图如图3.
MEGA8单片机的主程序通过CAN接口执行计算机发送的命令,并且定义了一个更新代码的特殊命令,当接收到该命令时,主程序首先关闭中断,关闭看门狗,然后跳转到BOOT的热启动入口,再执行BOOT烧录程序。完成后再直接跳转到$0000地址进入用户程序区,这样就完成了代码的在线升级。为了保证该命令的可靠性,本程序设计时规定单片机必须在100ms内同时接收到两次该命令才认为正确,超过100ms则不予认可。
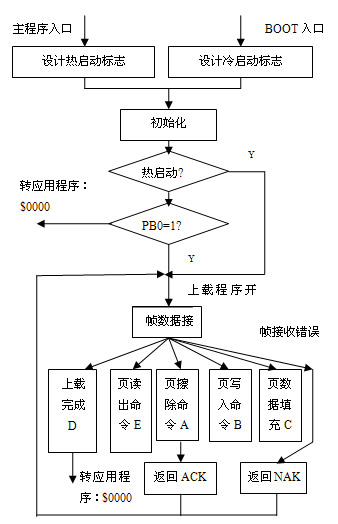
图3
4、结束语
由于采用了MEGA8单片机的BOOT功能,以及CAN总线高速远距离通信,同时抗干扰性强,使得远距离在线升级,譬如通过以太网、无线等方式,成为了可能。这对于系统调试及以后的升级维护都提供了极大的便利,这也是今后单片机和CAN总线发展的一个方向。由于该部分具有通用性,所以可很容易地移植到 AVR其它MEGA系列的设计方案中。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。