引 言
随着科学技术发展,各种产品性能的提升,DSP越来越多在各个器件上的应用。DSP是一门涉及许多学科而又广泛应用于许多领域的新兴学科。20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。重复控制技术能有效消除非线性负载和干扰引起的波形畸变;滑模变结构控制方法能使系统运行于一种滑动模态,能保证系统的鲁棒性;模糊控制和神经网络控制等智能控制不依赖控制对象的数学模型,适应于非线性系统;无差拍控制能够瞬时控制电压,对负载有很强的适应能力,有输出总谐波畸变少,损耗少等优点; PID控制简单,并具有好的可靠性;新型数字化PID控制更能取得满意的控制效果,基于此思想提出数字PID控制和无差拍控制技术相结合的控制策略。理论和实践证明,该方法具有广泛的应用前景。
1 系统结构设计
DSP2812功能比单片机强大的多,TMS320F2812 是美国TI 公司推出的C2000 平台上的定点32 位DSP 芯片,适合用于工业控制,电机控制等,用途广泛,应该相当于单片的升级版。运行时钟也快可达150MHz,处理性能可达150MIPS,每条指令周期6.67ns。IO口丰富,对用户一般的应用来说足够了。两个串口。具有12位的0~3.3v的AD转换等。具有片内128k×16位的片内FLASH,18K ×16 位的SRAM,一般的应用系统可以不要外扩存储器。具体的指标你可以查阅相关的数据文档。单片机电源是5v。dsp2812的内核1.8v供电,IO是3.3v供电。单片机有贴片或DIP,2812的引脚根据封装的不同有176脚的LQFP, 179脚的MicroStar BGA。
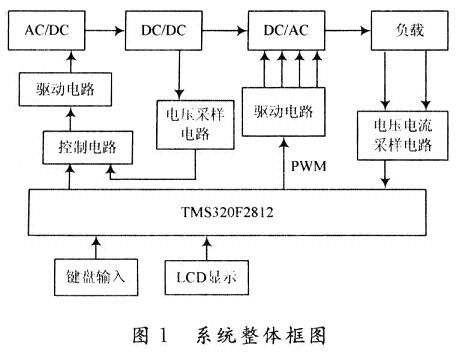
基于该芯片的逆变电源系统框图如图1所示。整个系统由AC/DC,DC/DC,DC/AC,以及滤波电路和其他辅助电路构成。通过采样电路采样得到的输出电压和电流经过DSP的A/D转换器转换成数字信号,作为数字控制器的反馈信号,从而改变输出电压的值,使其与给定输入电压相等。给定参考电压由软件方式实现,因此信号稳定无温漂、无干扰。这种控制方法在负载变化较快时仍然能保证输出电压不发生畸变。
2 逆变器控制方案及其参数设计
2.1 逆变器建模及其控制策略研究
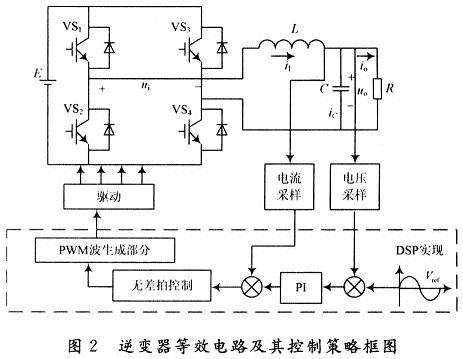
如图2所示,图中iL为电感电流;iC为电容电流;io为负载电流;uo为输出电压;R为逆变器负载电阻,VS1~VS4为逆变控制开关;r为电路阻尼电阻;L,C组成LC滤波器;E为逆变器输入直流电源。
该逆变器采用容量为400VA的工频变压器,铁芯采用45×60mm2的硅钢片。初级绕组采用直径1.2mm的漆包线,两根并绕2×20匝。次级取样绕组采用0.41mm漆包线绕36匝,中心抽头。次级绕组按230V计算,采用0.8mm漆包线绕400匝。开关管VT4~VT6可用60V/30A任何型号的N沟道MOS FET管代替。VD7可用1N400X系列普通二极管。该电路几乎不经调试即可正常工作。当C9正极端电压为12V时,R1可在3.6~4.7kΩ之间选择,或用10kΩ电位器调整,使输出电压为额定值。如将此逆变器输出功率增大为近600W,为了避免初级电流过大,增大电阻性损耗,宜将蓄电池改用24V,开关管可选用VDS为100V的大电流MOS FET管。
取x(t)=[uo(t)iL(t)]T为状态变量,平均电压ui(£)和负载电流为系统输入,则主电路的状态方程为:
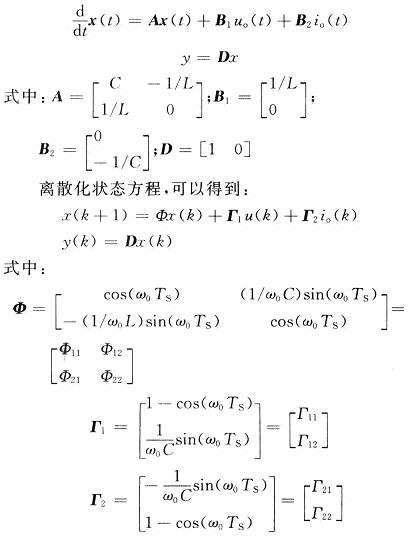
式中:TS为采样周期;ω0为二阶LC滤波器的谐振角频率。由此得出的电压电流离散化状态方程为:
针对该逆变器所设计研究的控制方法:采用双闭环控制算法调节系统的动静态特性,内环采用无差拍控制方法,尤其对非线性负载,输出波形失真小,可以改善系统的动态响应特性;外环采用瞬时值的数字PI算法,输出电压的瞬时值信号直接反馈,与参考正弦电压比较,使输出电压稳定在设定值上,并抑制输出电压的畸变。两种控制算法能互相弥补各自控制上的不足,使系统得到较好的控制效果。
2.2 电流内环
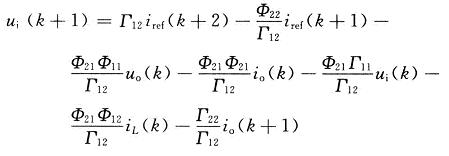
内环采用干扰无差拍控制策略,结合离散化状态方程和系统主电路图分析结果,可以得到无差拍控制实现方法为:
可以通过采用一个二阶预估方法对负载电流io(k+1)进行预估有:
![]()
而iref(k+1)可从外环控制算法中得出。
2.3 电压外环
电压外环采用增量式PI算法,其差分方程可以表示为:
![]()
PI调节器性能的好坏取决于KP,KI的选取。PI参数可以从理论上算出,但是由于系统参数的扰动性,采用仿真调试的方法来确定具有更实际的价值。
2.4 PWM波的生成
通过预估算法得到正弦参考电流iref(k),再根据内环控制算法可以算出uI(k),从而得到开关的控制时间,即PWM的脉冲时间,IGBT的导通时间为:
得到导通时间后,要进一步确定DSP中PWM输出寄存器的值。从而使DSP实现了对IGBT的通断时间的控制。
3 逆变器控制电路的仿真研究
搭建逆变器控制方法研究的仿真模型如下:
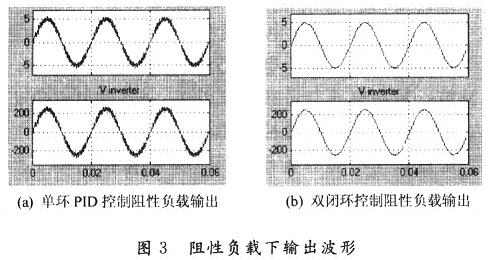
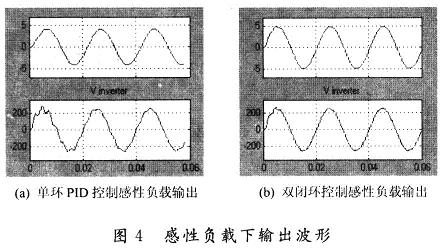
主电路参数:电感L=10 mH,电容C=20μF,额定阻性负载R=50 Ω,开关频率fS=1/Ts=10 kHz,直流电源电压E=310 V,输出电压有效值uo=220 V,频率f=50 Hz。
逆变器的主电路由直流稳压电源模块、全桥开关管模块、LCR模块、电压、电流测量模块、信号输入模块等部分组成;电压外环采用Simulink模块库中的PI离散控制模块;电流内环采用S函数子模块。仿真结果如图3、4所示。
4 结 语
如同上文所述,逆变器在工作时其本身也要消耗一部分电力,源逆变也有无源逆变。比如说直流电压,经过一个简单的单相H型晶闸管桥,H的横就是那个输出,H的竖线上各有四个晶闸管,编号上12,下34,则分别开通14和23就得到正负相隔的输出电压和电流了。逆变器的效率即是逆变器输出功率与输入功率之比。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。