1 引 言
高频逆变电源的可靠工作是感应加热的一个重要发展方向,分别从主电路,控制电路,驱动电路的设计出发,seo对提高高频逆变电源的工作状态下的可靠性进行了深入的研究,通过理论设计计算,计算机仿真和试验等方法,得出了高频逆变电源的研究结果。在对一般的感应加热电源电路结构分析的基础上,选择了适合功率和频率进一步提高的主电路拓扑。采用不可控整流,逆变调功的方式,使逆变器工作于略高于谐振频率的方式。保护吸收电路采用了简化的电流控制阻抗和阻容吸收的方式,来保护IGBT感应加热的安全。在对无源器件的高频模型分析基础上,指出了高频应用下无源器件的选择原则,分析了逆变器布局的要求,给出了逆变器布局的结果。
采用滑模控制方式的逆变器与传统控制方式相比,具有良好的动态特性、鲁棒性以及在电源和负载大范围变化时能保证系统稳定性的优点。滑模控制方式要求全状态变量反馈,且需要相应的基准参考量,增加电路设计的复杂性,所以一般的滑模控制方式大多停留在理论分析和仿真阶段。
滑模控制与常规控制的根本区别在于控制的不连续性,即一种使系统"结构"随时间变化的开关特性。由于功率变换器中开关元件的存在,使滑模变结构控制理论得到广泛应用。

2 负载回路的数学模型
图1为串联谐振感应加热系统电路结构图,其中负载回路由电容Cc、感抗L和电阻R串联形成振荡回路。假设直流电压Vdc连续,C远大于振荡电容Cc,变压器变比N为1.
假定初始电流为零,负载电路上电压为VS,则输出电流i0和电容电压vc的时域方程为:
由于采用软开关技术,系统的开关频率等于振荡频率。串联谐振电路的输入电压vs可由以下开关状态决定:
为方便地表述逆变器运行状态,引入一个新的离散变量M(k)如下;

图2为运行状态描述,(a)为开关导通状态;(b)为输出电流io,整流电流∣io∣,参考电流Iref,每半周期电流峰值Io;(c)为运行状态(1:输入功率模式,0:自由衰减模式);(d)变压器二次侧电压Vs。

于是,式(3)可改写成为:
![]()
该式表明,运行状态一旦确定,Vs的幅值为Udc,符号由i0(t)决定,式(5)中T=π/ωd是半个振荡周期,每半个振荡周期的输出电流峰值Io和电容电压Vc可用离散变量表示。由于Q远大于1,可认为;Vc比Io滞后π/2,可得差分方程:

电容电压Vc离散状态的动态峰值由式(7)自身表示。将式(7)代入式(6),就可得负载回路的离散电流状态方程:

M=1电路工作在输入功率模式下,谐振环节电流持续增加;
M=0电路工作在自由衰减模式下,谐振环节电流不断减小;
M=-1电路工作在再生功率模式下,谐振环节电流较自由衰减模式减小更快;
本文只使用前2种工作模式,即在功率输入与自由衰减2种状态运行,变量u(k+1)表示电流控制强度,实际取值为{1,0.5,0}。根据以上分析得到的离散电流动态模型,可分析电流控制器设计方案。
3 滑模变结构电流控制策略
本节讨论一种应用比例积分滑模的电流控制技术。目的是使在稳态下输出电流峰值的Io有一个较小的电流偏移量时,能够较为准确地跟随于期望的参考电流Iref,在阶跃输入时可以有快速的瞬态响应和较小的超调量。
引入滑模变结构控制理论(the theory of VariableStructure Control,VSC)。滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的"结构"并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定"滑动模态"的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。
电流控制的离散滑动模型可由式(8)表述。
滑模切换函数的选取影响系统的动态品质,本文采用电流误差积分滑模面,切换函数可表述如下:
![]()
S为离散滑模切换函数,Ki为积分增益,Ie=Iref-Io为电流误差。
电流控制器的控制律为:
![]()
感应加热系统电路参数L,C和R已定,则滑模控制系统响应完全由Ki决定。采样保持器检测输出电流峰值,并保存1个振荡周期,与参考信号比较并产生误差信号。电流控制器的输出决定下一个运行状态,当过零检测器检测到过零信号时就切换开关状态。从滑模控制系统稳定性、快速响应性、较好的鲁棒性和负载变化不敏感性等方面考虑,可以用较大的增益Ki来快速补偿偏移量。增益Ki设计的恰当,就能有效消除基频偏移量,得到稳定的输出电流。
3.1 积分器增益Ki的确定
对于离散准滑模系统,准确到达切换面常是不可能的,这里假设:
考虑到当Iref=Imax或Iref=0时为电流控制的极限值,且u(k+1)的值为{1,0.5,0),可确定增益值范围:
![]()
3.2 切换面吸引性分析
系统进入准滑动模态的到达条件:
![]()
要保证实现滑模控制,必须使比例积分滑模控制切换面具有可到达性。考虑u(k)的控制作用,由图2可以看出,当输出电流连续2个T小于参考电流值Iref时,u(k+1)的值为1,系统处于功率输出状态,使负载电流峰值上升;当大于Iref两个T时,u(k+1)的值为0,系统就切换为自由振荡状态;由于负载消耗,电流峰值必然会小于Iref,通过u(k+1)的计算,系统又切换至功率输出状态。由上述分析可知,状态空间中任意工作点都可在控制律的作用下到达式(14)确定的切换面,即切换面具有可到达性。
3.3 稳定性分析
定义Lyapunov函数:

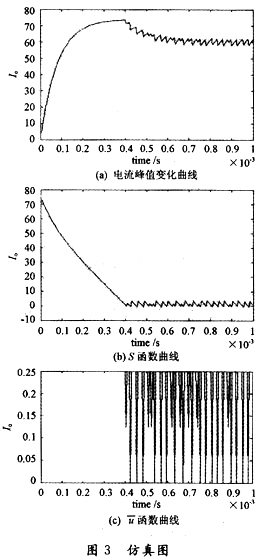
4 仿真结果分析
本文采用Matlab语言,编写M函数对上述模型进行仿真。参数选取如下:
R=0.2 Ω,L=12.0μH,Cc=0.2μF
计算可知电路谐振频率为100 kHz;增益Ki的值取为10000。设参考电流为60 A,初始电流值为0,N=4,则如图3所示。
5 结语
针对串联谐振感应加热电源逆变器,建立逆变器的负载回路离散数学模型,分析比例积分滑模控制电流控制器切换面参数的选择条件、可达性和滑模存在性及稳定性;选择适当的增益后,可使滑模控制对输出负载变化具有良好的快速性和鲁棒性。根据此模型,使基于DSP控制策略容易实现。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。