PSoC传感器应用平台
在嵌入式系统中,控制芯片主要处理两大类型的信号,一种是数字信号,另一种就是模拟信号。模拟信号通常来自于传感器。要从这些模拟传感器中获得准确的信号并不是一件容易的事情。模拟的输出信号通常振幅比较小,所以需要一个信号放大器。信号放大后,噪声会也被放大,又需要一个模拟的低通或带通滤波进行滤波。如果多种传感器同时使用,还需要一个模拟的MUX.除此之外,还可能用到比较器和D/A转换器。
传统设计中,控制器只用来实现处理数据、系统间的通讯和控制功能。如果您的设计也用这种传统的方式,就会面临一些挑战。这些挑战主要来自于分离的模拟器件和固定功能的MCU.首先从系统设计角度看,随着市场变化速度的加快和用户要求的提高,一个设计灵活的软硬平台是必须的,而分离的模拟器件和固定功能的MCU远远不能满足不断更新的设计要求和有限的研发上市时间。其次,处理传感器的噪声需要一个复杂的混合信号解决方案,通常需要放大器、滤波器、ADC、比较器和DAC.对于传统设计,便需要考虑非常多的独立的分离器件,这无论从产品成本还是生产成本来看都会成为负担。
PSoC系列单片机是在一个专有的MCU(Microprogrammed Control Unit)内核周围集成了可配置的模拟和数字外围器件阵列PSoC块,利用芯片内部的可编程互联阵列,有效地配置芯片上的模拟和数字块资源,达到可编程片上系统的目的。PSoC 是一种对于标准的"全数字式"微控制器设计、纯粹的模拟设计以及介乎此二者之间的所有设计而言具有同等的高适用性的器件,是一种具有极端灵活且完全可编程的混合信号SOC 的基本原理的全新一代器件。
采用一个微控制器,一个PSoC器件多可集成100种外设功能,从而帮助客户节约设计时间和板上面积,降低了功耗,系统成本也可降低5美分到10美元不等。方便易用的开发工具使设计人员能够准确选择所需的外设功能,包括放大器、ADC、DAC、滤波器及比较器等模拟功能以及定时器、计数器、PWM、SPI和UART等数字功能。PSoC系列的模拟功能包括轨至轨输入、可编程增益放大器以及14位的ADC,其噪声极低,输入损耗及电压偏移也非常低。PSoC设备包括32 KB的闪存、2 KB的SRAM、带有32位累加器的8x8乘法器、电源和睡眠监控电路,以及硬件I2C通信等。
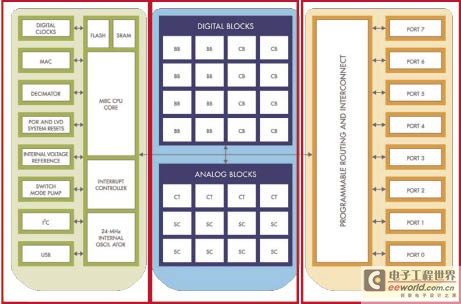
图1 PSoC产品框图

图2 超声波信号发送
从图1中可以看到,PSoC的整个系统是由MCU核、Memory、数字系统、模拟系统和其他系统资源组成。图中左边的部分是普通单片机的结构,包含时钟源、Flash、SRAM和MCU本身。右边是一些可编程的GPIO.中间部分就是PSoC特色,即可编程数字模块和模拟模块,PSoC的优势也正在这里。这些可编程的数字模块和模拟模块可以配制成不同的功能,例如UART、ADC、滤波器和PWM等等。此外,这些模块还可以重新配制来实现不同的功能,并且在任何时间都可以进行修改设计。PSoC支持动态配制的特性,相同的资源在不同的时间可以被配置成不同的用户模块,这样可以大大节省资源。数字模块和模拟模块可以和外部引脚互联,也是可编程的。因此通过PSoC,工程师可以基本完成一个系统的设计。
超声波传感器和倒车雷达系统
超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质或分界面会产生显着反射形成反射成回波,碰到活动物体能产生多普勒效应。因此超声波检测广泛应用在工业、国防、生物医学等方面。 超声波探头主要由压电晶片组成,既可以发射超声波,也可以接收超声波。小功率超声探头多作探测作用。它有许多不同的结构,可分直探头(纵波)、斜探头(横波)、表面波探头(表面波)、兰姆波探头(兰姆波)、双探头(一个探头反射、一个探头接收)等。
超声波传感器的使用类似于雷达,它主要完成两项任务:发送超声声波和接收超声声波。发送超声波相对简单,只要对超声波传感器发送的超声波进行脉冲宽度调制,同时开启计时器。而接收部分较为复杂,需要对信号进行调配,以便控制器能正确低识别反射回的超声波、确定接收时间并停止计时器技术,然后根据"距离 = 时间×音速"计算距离。通过图2,可以看到信号是如何被发送出去的。由控制芯片产生的PWM信号通过功率放大器放大,送到超声波传感器进行脉冲宽度调制,然后开启计时器。超声信号接收和处理的过程相对要复杂一些(图3)。从超声传感器输入的信号经PGA放大,在利用带通滤波器滤除噪声以后,将信号与直流偏置进行对比,通过输出调制信号,然后再将其将发送至低通滤波器,生成调制信号的包络线。该包络线再通过比较器或者AD转换器来判断它是否是真正的反弹信号,同时停止计时器,通过计数器的值和音速计算出距离。

图3 超声波信号接收
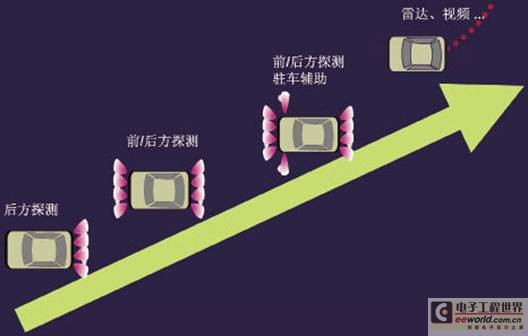
图4 倒车雷达的发展趋势
图4显示出倒车雷达发展的趋势,从图中可以看到,初的倒车雷达,只有后方探测,现在的倒车雷达不仅实现了前后方探测,甚至连左右侧都可以进行探测。还有一些更先进的技术,已经使用在汽车上。
低端倒车雷达系统
倒车雷达全称叫"倒车防撞雷达",也叫"泊车辅助装置",是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达各部分主要有以下几个作用:(1)超声波传感器:用于发射以及接收超声波信号,通过超声波传感器可以测量距离。(2)主机:发射正弦波脉冲给超声波传感器,并处理其接收到的信号,换算出距离值后,将数据与显示器通讯。(3)显示器或蜂鸣器:接收主机距离数据,并根据距离远近显示距离值和提供不同级别的距离报警音。
倒车雷达系统一般由两部分组成,分别是探头部分和主控部分。探头部分一般安装在汽车的尾部或两侧,而主控部分则位于汽车的前端,靠近汽车驾驶员。低端倒车雷达(图5)的探头部分,通常只包含超声波传感器,而主控部分包括CPU和所有的外围电路。探头和主控板通过传导线连接,传送发送和回波信号,一个主控板带3到4个探头。低端的倒车雷达系统成本通常较低,多采用分立元件,集成度也较低,因而性能较差,有效测量距离小于1.5m.此外,报警也采用简单的蜂鸣器。
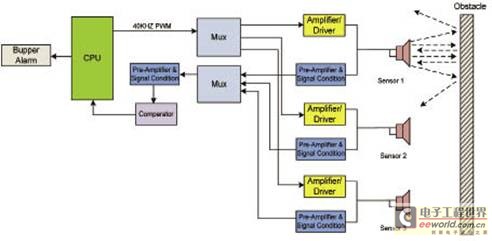
图5 低端倒车雷达系统框图
中端倒车雷达系统
中端的倒车雷达系统在探头上除了安装超声传感器以外,还包括发射信号的放大和驱动电路,以及接收信号的放大和信号调理电路,这样可以减小信号在长线传输中引入的噪声的影响。另外,在控制板上,使用了两级放大和带通滤波器以提高测量的性能。而测量的距离,通常通过数字显示的方式来显示,并且伴有声音的报警和提示。
高端倒车雷达系统
图7是一个高端的倒车雷达系统的系统框图。可以看到,本来处于主控端的一些功能模块都被转移到探头一端,它的特点是在探头上带有信号放大电路以及处理器,测量信号在传感器上实现处理,因此没有长线传输存在的信号干扰问题。另外,它可对每个传感器进行单独校准,通过LIN或其他串行方式与主CPU进行通讯。因为通常探头部分的体积都比较小,为了在探头上实现信号的放大和处理,就需要较高集成度的器件以方便传感器和PCB板的集成。
图8给出了倒车雷达传感器覆盖区域的要求,它要求在水平方向上70±5cm范围内100°;在100±5cm范围内,40°。垂直方向上,在50±5cm范围内60°;在110±5cm范围内,20°。

图6 中端倒车雷达系统框图
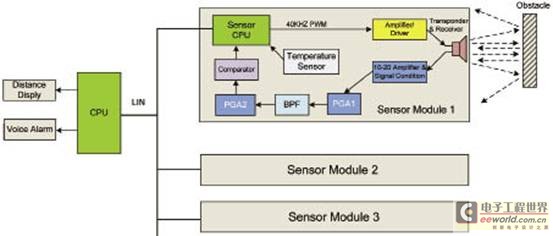
图7 高端倒车雷达系统框图

图8 倒车雷达传感器覆盖区域要求
Cypress倒车雷达控制系统参考设计
Cypress的倒车雷达控制系统使用PSoC系统的主要原因是:1、它的资源灵活,PSoC的模块资源具有可编程性,针对不同客户、不同定位的产品需求可重新配置;2、集成度高,集成了PWM w/DB、比较器、A/D转换器PGA等模拟模块,模拟集成度高;3、它几乎不需要外部器件,降低了 BOM 成本, 减小了电路板尺寸;4、它的IP保护能力强,很难被复制。
PSoC倒车雷达控制器采用CY8C24633芯片作为主控芯片。芯片采用M8C处理器,运行速度高达24M,内含8×8的乘法器和32位的累加器。工作电压范围为3V~5.25V,温度范围为工业级:-40℃~85℃。该PSoC芯片包括4个数字模块和4个模拟模块(2CT/2SC)。另外它还拥有针对电机控制而优化的高速8 位 SAR AD转换器。
图9为Cypress倒车雷达系统的硬件框图,采用CY8C24633用于主控板。该设计使用收发一体的传感器,并在传感器端增加初级放大电路。驱动信号为40kHz的脉冲信号。每个传感器采用3线连接方式与主控板连接,多可接6路传感器输入。对交流信号进行电平抬升,从而更好地处理回波信号。内部的模拟模块可配置成PGA、比较器及带通滤波器,并在器件内部实现互连。主控板与显示器通过串口连接,显示器通过数字方式显示探测距离。
图10给出了PSoC内部模块的配置和信号的路由,从图中可以看到,4个数字模块分别被配置成PWM计时器、定时器和串口发生器。而四个模拟模块分别被配置成两个PGA放大器和一个带通滤波器,信号的路由从图中也可以看得非常清楚。
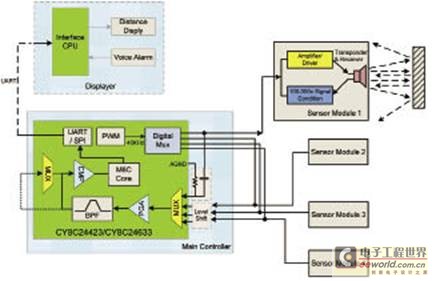
图9 Cypress倒车雷达控制系统硬件框图
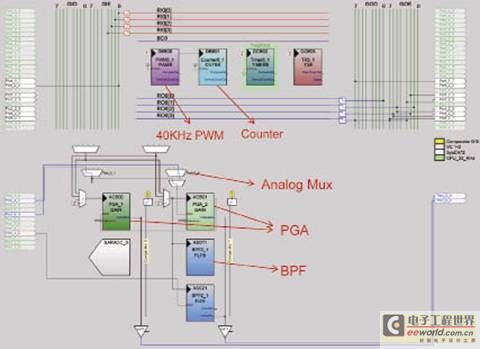
图10 PSoC内部模块配置
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。