摘要 采用传感器和太阳位置计算相结合的方法,设计了基于TI公司的TMS320F2812的高太阳跟踪器。一方面可以防止较大误差积累,另一方面可以避免光线、天气情况的影响,跟踪得到了较大提高,能够很好地应用于光伏发电系统实现对太阳的跟踪。
关键词 太阳跟踪器; 硅光电池传感器; TMS320F2812;
引言
太阳能是一种无污染、无噪声、无公害的可再生能源,目前开发利用太阳能的方式很多,光伏发电是其中一种主要的利用方式。所谓光伏,是以太阳能电池为媒介,将太阳光直接转化为电能的过程。我国目前采用的光伏发电电池以普通单晶硅多晶硅为主,转换效率较低;聚光电池转换效率较高,但需要跟踪较高的太阳跟踪器,时时刻刻跟踪太阳,使太阳光线与集光板垂直,利用图1所示的菲涅耳透镜使光线汇聚在聚光器的聚光电池上,提高能量密度,从而提高发电效率。

1 太阳跟踪器跟踪原理
目前国内外的太阳跟踪器按跟踪原理分为:传感器检测的主动跟踪原理和太阳位置计算的被动跟踪原理。本文将两种原理相结合设计了基于TI公司的DSP芯片TMS320F2812的太阳跟踪控制器。太阳自动跟踪器由传感器、信号处理及补偿、微处理器、执行机构驱动接 口等单元电路组成(选择不同的执行机构可以满足不同的应用场合),驱动太阳 能设备自动对准太阳。当太阳光线发生偏移时,传感器输出信号,经过信号处理及 补偿电路的处理,进入到微处理器,微处理器根据输入信号,运行跟踪算法,输 出控制信号,通过接口电路单元驱动执行机构调整太阳能设备的角度,从而实现 自动跟踪太阳的目的。
1.1 传感器检测的原理
利用硅光电池的光电效应,在太阳能集光板上高度和方位方向各放置两个长方形的硅光电池板,阳光通过通光筒照射在硅光电池板上,如图2所示。
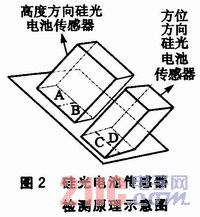
高度方向硅光电池被分为A、B两个区域,方位方向硅光电池被分为C、D两个区域。通过电压比较电路可分别计算出它们之间的电压差:
其中,UA、UB、UC、UD为A、B、C、D各点的电压,K为标定系数,由此可在一定范围内检测角度偏差,从而确定运动方向和角度变化大小。
1.2 太阳位置计算的原理
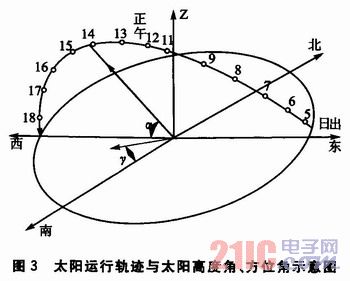
太阳在天球上的位置可由太阳高度角和太阳方位角来确定。地球上观测点同太阳中心连线与地平面的夹角,称为太阳高度角;地球上观测点同太阳中心连线在地平面上的投影与正南方向之间的夹角,称为太阳方位角。太阳运行轨迹与太阳高度角α、方位角γ的关系如图3所示。
要计算α和γ,可以采用以下计算方法:
![]()
δ为太阳赤位角,ω为太阳时角,φ为当地的纬度。对于δ和ω这两个参数的计算要满足高跟踪的需求,并根据实际情况来不断修正;同时,还需要结合传感器检测的原理加以修正。采用TMS320F2812做主处理器,根据硬件时钟提供的日历时间计算出太阳的高度角和方位角,进而控制电机转动方向和角度,由传动机构带动支架转动地跟踪太阳。
2 跟踪器体系结构设计
根据上述工作原理,本设计以太阳位置计算的方法为主要跟踪方式,采用硅光电池传感器进行角度偏差反馈,设计了高太阳跟踪器。
2.1 主要控制电路硬件设计
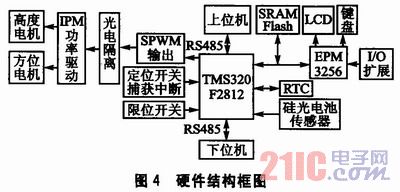
硬件结构框图如图4所示。选用TI公司32位定点数字信号处理器TMS320F2812和Altera公司的CPLDEPM3256为主协处理器。由DSP(数字信号处理(Digital Signal Processing)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。德州仪器、Freescale等半导体厂商在这一领域拥有很强的实力)完成计算与控制算法,并产生用于步进电机控制的SPWM波;输入/输出接口采用光电隔离;驱动器电路选择IPM模块,可以达到功率驱动的目的,进而驱动高度和方位步进电机运转。CPLD是从PAL和GAL器件发展出来的器件,相对而言规模大,结构复杂,属于大规模集成电路范围。是一种用户根据各自需要而自行构造逻辑功能的数字集成电路。其基本设计方法是借助集成开发软件平台,用原理图、硬件描述语言等方法,生成相应的目标文件,通过电缆(“在系统”编程)将代码传送到目标芯片中,实现设计的数字系统,实现实时显示、扫描键盘、接收扩展中断等功能。二者通过DSP的外部接口(XINTF)进行通信。采用光电开关和限位开关分别实现定位、限位功能,提高了系统的稳定性和可靠性。采用LCD显示和5×5矩阵键盘,方便进行人机交互的临时调整操作。
首先利用光电定位开关和硅光电池传感器进行初始对准,通过TMS320F2812的SPI总线设置硬件时钟RTC初值后,利用硬件时钟实时读取时间并计算太阳高度、方位角。在设定的工作时间内,依据计算的太阳高度、方位角选择合适的运行时间和运行速度,计算步进电机应该转的步数和控制板应该发的脉冲数。由 EV事件管理器产生SPWM波,经IPM功率驱动后,驱动高度和方位方向步进电机转动,经机械传动带动太阳能集光器支架转动适当角度,实现自动跟踪。每天工作完以后自动返回归位,若出现较大位置偏差,可以由光电开关和硅光电池传感器进行修正。修正完毕重新进入自动跟踪,工作完成后自动返回。
2.2 主要控制软件设计
系统在正常工作时,每天从定位开关处开始自动运行,晚上返回定位开关处。启动和返回时间由太阳高度决定。在完成一周期(即一天)的跟踪后由时钟电路的定时中断信号进入休眠状态,或定时由继电器关闭总电源,减小系统功耗,待次日由定时中断信号或值班电路给出信号唤醒处理器进入下一周期工作。控制软件程序流程如图5所示。

3 实际效果与误差分析
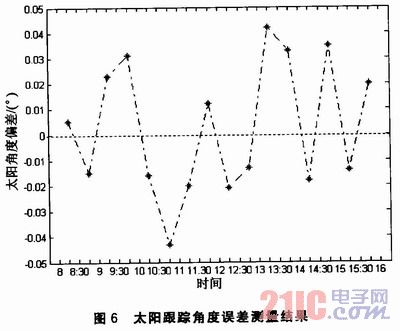
将设计的太阳跟踪器应用在太阳能发电中。从2010年4月某天早上8:00工作至下午17:00,典型误差测量结果如图6所示。由于机械结构和传动机构等的误差,以及外界不确定环境(如大风等)的影响,跟踪角度存在无规律性误差,但总体来说误差可以控制在±O.05°之内。
实践运行情况表明,太阳跟踪器实现了高跟踪,年平均发电量比固定式高了20%~40%,比普通单轴式高出约25%。可见,该设计方案能够使光伏发电效率大大提高。
结束语
本文对光伏发电系统中太阳跟踪器的跟踪原理进行了研究,阐述了基于TMS320F2812的太阳跟踪器的软硬件设计方法。设计了一种自动跟踪太阳高度角与方位角转动的自动太阳跟踪器,现场运行结果表明该系统跟踪准确、能耗低、可靠性高、系统性能稳定,发电效率提高35%以上,对以后建设电站等具有指导性意义,具有跟踪高,成本相对较低,便于操作,性能稳定可靠,等的优点,大大提高了光伏发电效率,具有较高的实用价值。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。