随着微电子技术和通信技术的发展,需要实施远程监测和控制系统,系统采用上、下位拓扑结构,通信采用物理链路PSTN形式来实现远程监测、检测。电子技术是根据电子学的原理,运用电子器件设计和制造某种特定功能的电路以解决实际问题的科学,包括信息电子技术和电力电子技术两大分支。信息电子技术包括 Analog (模拟) 电子技术和 Digital (数字) 电子技术。
1 系统设计方案
系统采用上、下位主从结构设计,上位机为主叫方。下位机为被叫方上位机以定时巡检或随机抽检两种方式远程获取各下位机采集到的空气质量数据。下位机分布在城市的各检测点,负责采集空气质量数据,自动应答上位机呼叫并上传数据。
2 远程监测系统下位机的硬件设计
系统硬件设计的关键是基于PSTN通信接口电路,模拟信号采样电路及满足无人职守要求的下位机控制电路。
2.1 下位机的硬件设计
按照功能规划和系统设计要求,确定本系统的硬件框架,如图1所示。
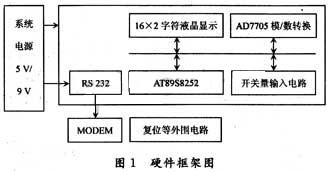
2.2 CPU模块设计
兼容标准MCS-51指令系统的AT89S8252单片机是一个低电压,高性能CMOS 8位单片机,片内含8k bytes的可反复擦写的只读程序存储器(PEROM)和256 bytes的随机存取数据存储器(RAM),SPI串行口用于编程向下装载,器件采用ATMEL公司的高密度、非易失性存储技术生产,片内置通用8位中央处理器和Flash存储单元,功能强大的AT89S8252单片机可为您提供许多高性低比的系统控制应用领域。如图2所示。

为了适应LCD液晶模块的接口要求,在P0数据地址复用总线口上扩展了U3(74HC373)作为低8位地址锁存器,产生LCD模块读写所需驱动信号的输入信号A0,A1。图2中LCDIN为液晶模块地址选择口线。
系统采用MAX813L实现复位需要,由S1实现手动复位(主要用于调试期间的复位)。由此实现的复位电路具有电源电压监视能力,即当电源电压低于4.65 V时产生高电平复位信号;同时也具有上电复位能力。
在图2中,CZ2为四路开关量输入口,CZ8为功能扩展预留口。从图中可知,系统的主频为6 MHz。图中,ADSCK,ADIO及ADRDY为模数转换接口信号;MODEM作为MODEM电源控制信号;LED为系统指示灯控制信号。
2.3 人机界面设计
本系统中人机界面主要是显示界面,因为是远程控制系统,因此下位机没有设计按键按钮电路。具体接口电路如图3所示。
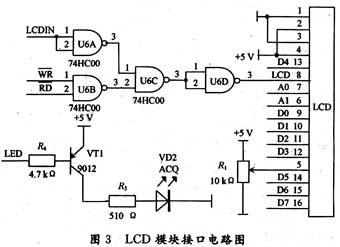
接口设计,由LCDIN,WR和RD组合产生液晶模块的使能信号E(即图中的LCD信号),A0为读写选择信号(R/W),A1为寄存器选择信号(RS)。
2.4 MODEM通信接口设计
Modem,其实是Modulator(调制器)与Demodulator(解调器)的简称,中文称为调制解调器。计算机内的信息是由“0”和“1”组成数字信号,而在电话线上传递的却只能是模拟电信号。于是,当两台计算机要通过电话线进行数据传输时,就需要一个设备负责数模的转换。这个数模转换器就是我们这里要讨论的Modem。计算机在发送数据时,先由Modem把数字信号转换为相应的模拟信号,这个过程称为“调制”。经过调制的信号通过电话载波传送到另一台计算机之前,也要经由接收方的Modem负责把模拟信号还原为计算机能识别的数字信号,这个过程我们称“解调”。正是通过这样一个“调制”与“解调”的数模转换过程,从而实现了两台计算机之间的远程通讯。
远程控制系统的关键模块是通信模块,PSTN远程系统的关键是调制解调器通信接口模块。本系统的MODEM接口设计如图4所示。
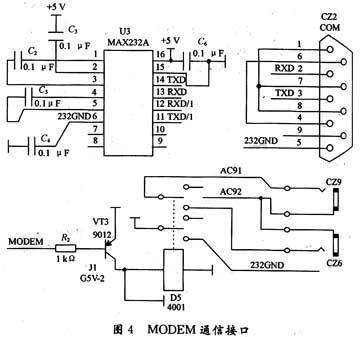
MAX232 作为TTL-RS 232电平转换芯片,是微处理器与MODEM之间的接口电路,51系列微处理器虽然有串行输入/输出口,但不具有RTS,CTS,DTR等标准接口握手信号线,MAX232芯片是美信公司专门为电脑的RS-232标准串口设计的单电源电平转换芯片,使用+5v单电源供电。只通过TXD,RXD和底线GND进行连接,同时对其他信号做以下处理:
(1)7(RTS),8(CTS),1(CD)等三信号短接;
(2)6(DSR)、4(DTR)等两信号短接。
从图中可知,RS 232的接线端与连MODEM的DB9(即图中CZ2)的第二脚(接收端)相连,发送端与DB9的第三脚(发送脚)相连,通过软件的设置与处理,实现“三线式”远程通信。
在接口电路设计中,引入了MODEM电源控制电路,即下位机每次响应呼叫并正确发送数据后,由看门狗自动实施下位机系统整体复位,对MODEM的复位命令是通过电源的上电来实现的,因为MODEM可能无法响应微处理器传来的复位命令。该继电器可靠性高,负载能力为2 A/30 V (DC),工作电压为5 V,与5 V微处理器系统接口简单。
3 远程监测系统下位机的软件设计
基于“三线式”的MODEM通信接口程序,关键是软件握手信号的处理;模拟/数字转换接口程序,关键是AD7705的初始化和双通道的切换;主模块框架的构建,关键是微处理器资源的合理分配和使用;关键是软硬件看门狗的应用。
3.1 下位机的软件框架
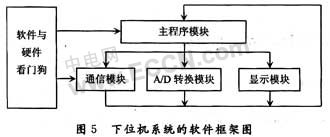
整个下位机系统的软件框架如图5所示。
3.2 软件主模块设计
在图5中,主模块、通信模块、A/D转换模块及显示模块为独立模块,主模块为,管理其他3个子模块,这4个模块均为实模块;而软件与硬件看门狗模块为虚模块,它以适当的形式和适当的时机存在于主模块和MODEM通信模块中,实现下位机在软故障条件下的自恢复。
软件中主模块是管理模块,设计的考虑因素有:
(1)系统资源的合理使用,例如中断资源、内部存储器和寄存器资源;
(2)在实现功能的前提下,保证程序的简化和优化,减少调试工作量。
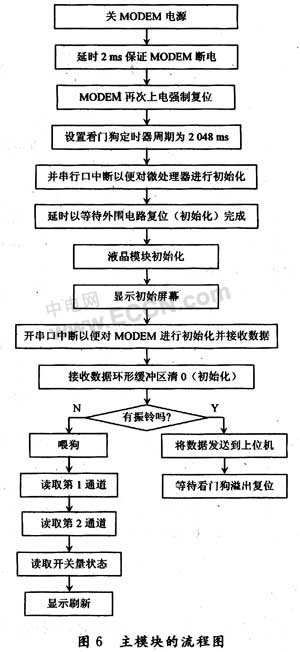
主模块首先考虑的是A/D转换和通信之间的关系问题,其次是各模块的层次问题,是看门狗在各模块中的嵌入问题。
主模块的流程图如图6所示。
4 结语
随着信息时代的飞速发展及新型单片机技术在控制领域的发展和应用的拓宽。远程监测在工业管理也得到了实际应用,研究提供了一种监控应用系统,并将其应用到地区之间的管理系统中,实现了监测的数据共享,为环保部门提供一种新型,可视化,高效的远程监测与管理系统。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。