直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、高层电梯等需要高性能可控电力拖动的领域中应用历史悠久。大功率直流调速系统通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速,传统的控制系统采用模拟元件,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,故系统的运行可靠性及准确性得不到保证,甚至出现事故。
目前,直流电动机调速系统数字化已经走向实用化,其主要特点是:结构简单、维修方便、动态参数调整方便、系统可靠性高、可采用数字滤波来提高系统的抗干扰性能、可采用数字反馈来提高系统的、具有信息存储和数据通信的功能以及成本低。
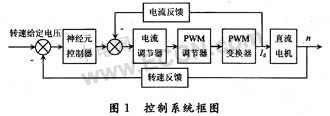
1 控制系统的控制方案
系统控制框图如图1所示,采用串级控制,分为转速环(外环)和电流环(内环)。为了提高系统响应的快速性和限流的必要性,电流环仍采用传统的PI调节器,而转速则采用神经元控制器,以提高其鲁棒性。
单神经元自适应PSD算法控制框图见图2。
2 单神经元PSD自适应控制算法
位置敏感器件PSD (Position Sensitive Device)。PSD 属于半导体器件, 一般做成P+IN结构,具有高灵敏度、高分辨率、响应速度快和配置电路简单等优点, 其弱点主要是非线性。其工作原理是基于横向光电效应。作为新型器件, PSD 已经被广泛应用在位置坐标的测量上, 如: 兵器制导和跟踪、工业自动控制、或位置变化等技术领域上。
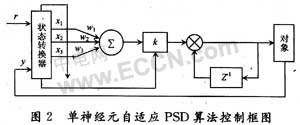
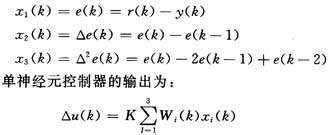
图2中状态转换器的输人为设定值r(k)和过程输出y(k),转换器的作用是获得单神经元的三个输入量x1(k),x2(k),x3(k),在这里:
其中:Wi(k)(i=1,2,3)为对应于神经元输入xi(k)的加权系数。
控制器总输出为:
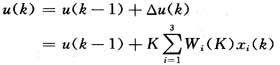
z(k)为教师信号,在这里取z(k)=e(k)。这是因为控制效果主要与e(k)和△e(k)有关。为了保证学习算法的收敛性和控制的鲁棒性,一般采用规范化学习算法以构成单神经元PSD控制规律,所以单神经元自适应PSD的控制算法如下:

控制系统以LM3S8962为,LM3S8962是基于ARM?CortexTM-M3的32位RISC控制器,具有内部存储器、4个通用定时器、遵循ARM FiRM规范的看门狗定时器、控制器局域网(CAN)、10/100以太网控制器、同步串行接口(SSI)、2个完全可编程的UART、4个10位ADC、模拟比较器、I2C、6个PWM输出、2个QEI模块。
3 控制系统的硬件设计
系统主电路采用晶闸管三相全控桥式电路,控制电路主要由LM3S8962芯片构成,一是完成速度脉冲的采样、控制算法的实现和控制极脉冲的输出等。二是完成起、停控制,键盘及显示器接口等。系统硬件方框图如图3所示。
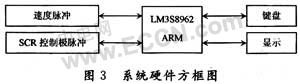
从LM3S8962芯片出来的PWM输出信号,经过光电隔离驱动,送入晶闸管控制极,实现对全控桥的控制。
电流检测回路采用霍尔电流传感器CSNP661检测直流电流Id,当检测到电流值超过设定的限幅值时ARM立即进行中断处理,封锁输出给晶闸管的PWM信号,并发出声光报警信号。
系统采用测速发电机测量电动机转速,把转速信号转换成电压信号,经分压电阻送给ARM的ADC转换输入中断。
4 控制系统软件设计
软件结构:本系统软件采用功能模块设计方法,软件由系统、主程序、中断服务子程序及其他相关的子程序组成。
主程序主要完成芯片的初始化、变量的初始化等。
中断程序主要包括ADC转换结束中断等几个部分。
在串行口中断中,主要完成与主机信息的传输,根据制定的串行通信协议,按照主机的命令进行各种动作。
在ADC中断中,通过ADC转换的数值经过计算得到当前负载电流值,进行电流环调节,每经过一定次数电流环调节,就进行速度环调节,以保证系统按照要求进行控制。
5 仿真实验
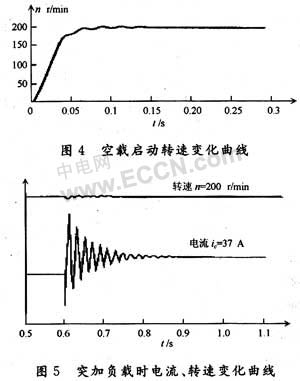
为检验本系统的控制性能,对直流电机(额定数据:380 V,37 A,200 r/min)进行了空载起动和突加负载的仿真实验,得出电流和转速的变化曲线如图4和图5所示。
6 结语
实验结果表明,本系统结构简单,控制可靠,能保持快速响应及无静差和较小超调等优良性能,采用了高性能高的ARM芯片的模糊控制器,能达到很高的控制。同时,系统具有较强的扩展能力,可以通过串行口或者以太网与上位机通信。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。