传感器作为信息获取的源头,在自动化测试及控制系统中发挥着重大的作用。在很多应用场合,传统传感器由于测量参数的单一性已经不能满足实际需要。人们希望一个传感器能完成传统多个传感器的测量任务,尤其是在一些较危险的坏境下,在这样的需求下,多参数传感器应运而生。但是随着传感器测量的物理量个数增加,传感器结构越复杂,发生故障的概率也越大,因此更需要对传感器的输出值进行自确认。也就是要求传感器不仅能输出测量值,同时能够对自身的工作性能、状态进行在线评估,能够实现故障的自诊断和自恢复。
目前实现上述功能需要20~50个电子控制单元(ECU),所用到的传感器差不多有70~150个。这些传感器负责测量的环境数据范围很广,有压力、温度、流量、速度、加速度以及角度等。它们将测量值送到ECU进行引擎和环境控制、安全气囊触发,从而提升舒适度和安全性。
ECU(Electronic Control Unit)电子控制单元,又称“行车电脑”、“车载电脑”等。从用途上讲则是汽车专用微机控制器,也叫汽车专用单片机。它和普通的单片机一样,由微处理器(CPU)、存储器(ROM、、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。电控单元的功用是根据其内存的程序和数据对空气流量计及各种传感器输入的信息进行运算、处理、判断,然后输出指令,向喷油器提供一定宽度的电脉冲信号以控制喷油量。电控单元由微型计算机、输入、输出及控制电路等组成。在这些应用中,各种系统的自诊断能力正变得日益重要。对于那些与安全息息相关的系统来说,系统禁用和应急启动都相当重要。

图1:如今汽车内的电子元器件价值已占到总车的15-20%。
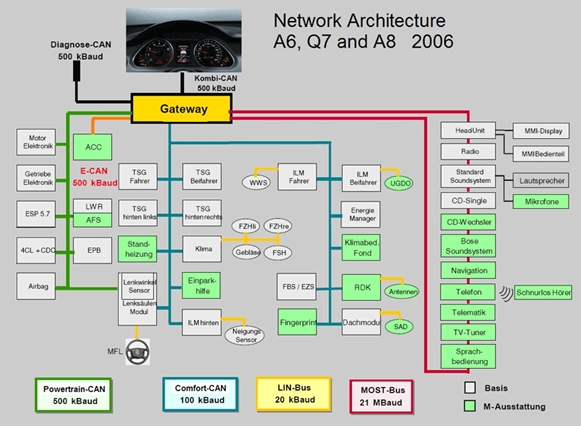
图2: 在现代车辆中,常常需要10到20条不同的数据总线将不同的装配连接到一起。
作为网络应用的汽车电子
一份有关汽车电子控制系统的分析显示,这些装配的复杂度呈现指数上升。简单的电子控制和调节装备已经被更为复杂的IT系统取代。在这其中,除了实际硬件外,软件以及ECU间的双向通信已成为一个新的关注点。
车辆中的大量应用已然转变成了网络应用。以往的常见架构(即一个ECU实现一个应用)已经被多个ECU共享的网络功能所取代。
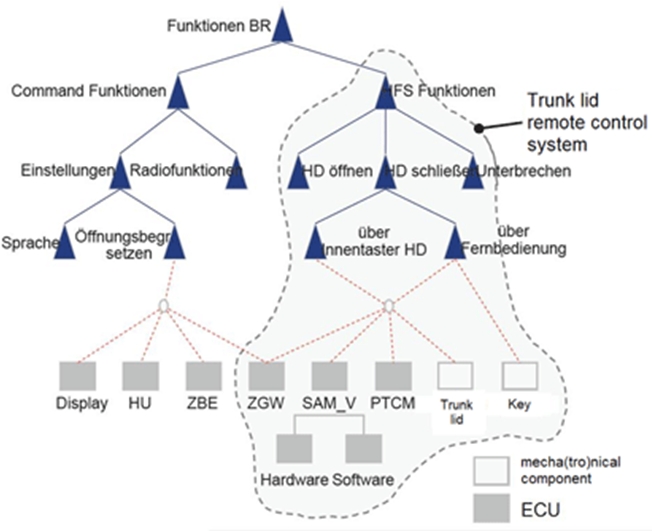
图3:后备箱盖功能树。
图3是一个后备箱盖的功能树。在这里,打开后备箱实际上需要激活两个ECU。
任何错误都会导致系统故障。打开后备箱盖这个动作可能出现的错误模式有6个。应该是某个错误使得传感器故障,这可能会在ECU的故障存储器中产生十几个不同的输入。
汽车传感器目前所用的通信协议仍然是模拟输出。这是典型的点对点连接——即一个传感器与一个ECU连接,并以电压作为其输出信号。尽管已经进行了一些改善,例如提高分辨率,或增加诊断范围(LDR, UDR,见图4),但模拟输出仍然是90年代至今该技术的。
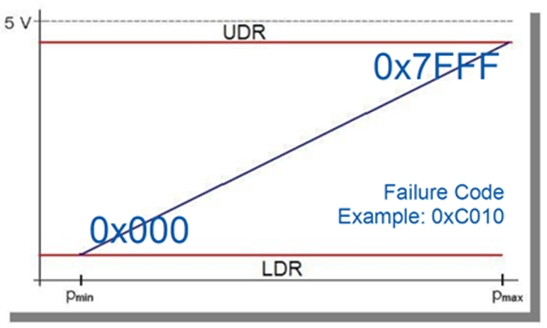
图4:
模拟输出只允许进行信号范围内(如10-90%)的传感器信号传输,并通过开关将低诊断范围(LDR)和高诊断范围(UDR)转换为故障状态。
解决这一问题的方法是在传感器模块与ECU之间采用数字通信,来传输除传感器数据之外的状态信息、时间戳以及误差代码等。不过遗憾的是,向数字通信转变所引发的问题异常复杂,因为传感器的种类相差太大,而且不同的传感器供应商所采用的架构也有所不同(见图5)。

图5:传感器的种类相差太大,而且不同的传感器供应商所采用的架构也有所不同。
从模拟角度来看,市场上提供各种针对所有环境变量的传感器,而且几乎所有ECU微控制器都有模拟输入口。因此,利用市场上现有的元器件,或仅需进行微调的产品开发新应用不会出现大问题或者大风险。
但这样的情况却不适合数字通信协议。可用的标准协议必须以特定方式使用。目前可用的数字协议包括:
CAN:总体来说太过复杂,传感器成本过于昂贵
LIN:仅支持为19,200 baud的低传输率
外部传感器接口(PAS4,PSI5):专为安全应用(如气囊)开发,要求9V工作电压,电流消耗大
SENT:只能支持单向,目前还处于标准化阶段中
于是,在需要数字通信的应用中通常会采用专有方案。这意味着每个电路制造商都有自己的专有协议。支持ZMD31150、ZMD的ZACWire提供一个开放标准,能够提供通信安全,在波特率和行末校准方面具有灵活性。
未来几年的挑战,是制定和执行考虑到传感器系统和应用要求并具成本效益的标准化数字接口。该接口必须满足下面三个多少有些矛盾的设计条件:
电路测试:为了测试成本化,要求通信速度化
校准:尽可能简单、灵活
应用:尽可能快速、安全和兼容,特别是在超出规范工作电压、EMC高以及RF辐射受限的条件下。
汽车传感器在安全方面的应用正日益增加。对于可以在危险的刹车条件下减小刹车距离的刹车辅助系统来说,需要一个传感器来测量刹车系统的压力,使得ECU能够检测出由驾驶员所发出的刹车动作。传感器是激活ABS的关键,故传感器必须100%准确。
如果传感器信号调节器IC发现模组中的传感器故障,或者由于外部故障引起了SSC的无效操作,ECU必须能够确定这些问题。ZMD31150是一款在汽车应用中进行信号调节的SSC。
ZMD31150中执行的诊断功能(见图6)将对传感器机能以及SSC进行连续监控。
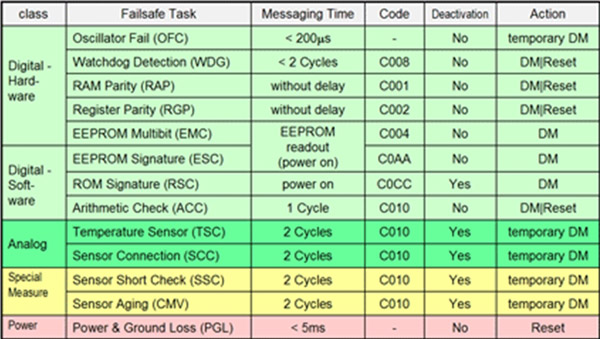
图6:ZMD31150中执行的诊断功能
一旦检测到故障,诊断模式(DM)被激活。数字通信消息中将建立一个错误标志,或者将模拟输出切换到预先编程的诊断范围LDR或HDR上。
可检测故障分为两类,即硬件和软件错误。硬件错误是在SSC中检测到的由硬件问题所引发的故障。
相反,软件错误的原因就不会总是这么清楚或连续出现。它们可能由外部原因引起,如EMC干扰或者系统板上其他电气负载进行开关操作。针对软件错误,这里使用了一个错误计数器,当错误发生时进行“+”运算,而当错误不再发生时进行“—”运算。当检测不到软件错误时,软件错误消息被低通过滤,传感器返回到正常操作模式。
ZMD31150中的临时DM是一个可选项,在错误持续出现时提供可靠的错误信息。利用附加信息(如冗余传感器或进行大量检查),ECU将决定当前应用能否继续可靠工作,或者根据错误消息必须关断。
如果随着感性负载(Schaffner Pulse 3a或3b)接通,某个故障耦合到了传感器系统的电源电压上,该故障同样能够耦合到传感器上,从而触发自诊断功能。但是有了临时DM,这种情况不得不连续出现几次后才向ECU错误。由于错误计数器过滤了结果,明显的错误信息和相应的误导将被避免。
本文小结
利用传感器信号调理IC可以大大简化汽车安全传感器系统的开发。确保传感器输出100%正确的自诊断功能,只能在信号调整阶段实现,鉴于此,该功能必须是片上实现。
像ZMD传感器调理IC这类的器件集成了全面的自诊断功能。通过配置EEPROM,可以对某个错误进行定义,并且对系统如何反应进行定义。对检测到的错误事件进行响应的各类执行程序,有助于避免明显的虚假错误信息,从而可以增加自诊断的可靠性。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。