1、引言
电动机是一种旋转式机器,它将电能转变为机械能,它主要包括一个用以产生磁场的电磁铁绕组或分布的定子绕组和一个旋转电枢或转子,其导线中有电流通过并受磁场的作用而使转动,这些机器中有些类型可作电动机用,也可作发电机用。电动机作为一种拖动机械因具有结构简单、价格低廉、使用维护方便等优点,在国民经济各个方面被广泛采用。在当代,随着电子技术的发展和智能电动机保护器技术的成熟而普及率越来越高。
智能电动机保护器采用了微处理器技术,不仅解决了传统的热继整定粗糙、不能实现断相保护,重复性差、测量参数误差大的缺点。保护器通过电流来判断断相故障,软件模拟热积累过程的方法来实现过载保护等方法保证了电机的可靠运行,而微处理器强大的扩展性包括开关量输入、继电器输出,4~20mA变送输出、RS485通讯等很好的满足了控制系统的"四遥"功能。
电动机保护器提高了电动机运行的可靠性和系统智能化要求,因此保护器的可靠运行起着举足轻重的作用,同时也对保护器抗外界干扰提出了比较现实的要求。下面就从硬件和软件两个方面提出可靠性设计。
2、硬件可靠性设计
2.1 微处理的选择
采用Freescale公司的高性能处理器MC9S08AW60.MC9S08AW60是Freescale公司一款基于S08内核的高度节能型处理器,是款认可用于汽车市场的微控制器。可应用在家电、汽车、工业控制等场合,具有业内的EMC性能。
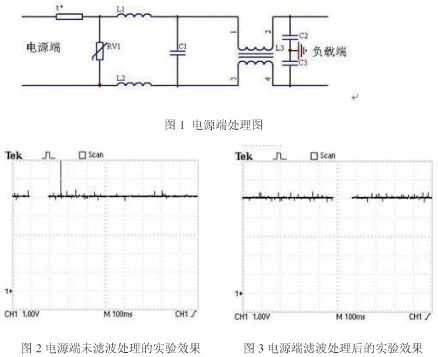
2.2 电源端滤波处理
利用电磁原理进行硬件电路滤波是提高保护器EMC的有效方法。线路如下图,经热敏电阻t、压敏电阻RV1、电感L1、L2、差模电容C1、共模电感L3、共模电容C2、C3组成的两级滤波处理,很好的隔离了由于电源端的输入和输出干扰。PTC热敏电阻器的主要用于过流过热保护,直接串在负载电路中,在线路出现异常状况时,能够自动限制过电流或阻断电流,当故障排除后又恢复原态,俗称"万次保险丝".根据线路的工作电流来确定选择。压敏电阻主要用于吸收各种操作浪涌及感应雷浪涌过压保护,以防止这类过电压干扰或损坏各种电路元件。根据设计经受的浪涌电压按照允许使用电压和通流容量来选择。其中,L1、L2、C1为抑制差模干扰,L3、C2、C3为抑制共模干扰。L1、L2铁芯应选择不易饱和的材料及M-F特性优良的材料。按照IEC-380安全技术指标推荐,图中元件参数的选择范围为:C1=0.1~2uF;C2、C3=2.2~33uF;L3为几个或几十毫亨,随工作电流不同而取不同的参数值。
按照下面公式计算C2、C3的容量:Ii=2πfCyU
式中:Ii───允许的交流漏电流
f───电源频率;
U───电源供电电压。
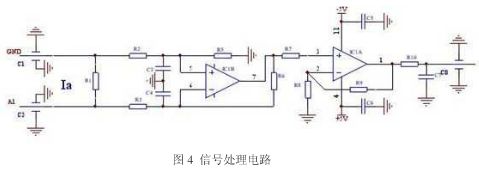
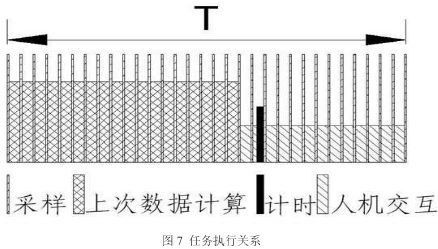
上图为电源端是否使用滤波器,使用瑞士TRANSIENT 2000电磁兼容测试仪1000V 100KHZ 0.75mS条件EFT群脉冲实验,从TEXtronix TDS1012B捕抓到的信号比较,未使用滤波处理的电源输出端产生了尖峰脉冲,会导致微处理器复位,甚至死机。
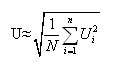
2.3 信号端处理
谐波和电磁辐射干扰会导致保护器误动作,使电气仪表计量不准确,甚至无法正常工作。在电动机控制回路中产生该类干扰源为变频器和现场对讲机。解决的方法有:一是信号输入线胶合,胶合的双胶线能降低共模干扰,由于改变了导线电磁感应的磁通方向,使其感应互相抵消。二是内部线路处理。如下图,采用双差分输入的差动放大器,具有很高的共模抑制比。在输入回路中接RC滤波器、信号的输入和输出端使用专用器件、降低输入输出阻抗、可靠接地和合理的屏蔽等措施。
2.4 保护输出端处理
输入输出端采用光电隔离的方法,也是可以消除共模干扰,同时在保护继电器的的输出端并接压敏电阻,有效的提高了继电器的寿命,也降低了由于外部接触器动作对内部的干扰。考虑到客户使用控制电压的不确定性和接触器线圈容量,确认使用MYG14D821。

2.5 外部存储技术和看门狗保护电路
使用外置存储芯片X25043,SPI接口。微处理器内置SPI控制模块,方便的与该芯片接口,外部存储技术保证了运行状态和事件的记录。低电压复位和外部看门狗提高了保护器的可靠性。
2.6主体与显示单元通过RS485连接
考虑到使用环境的特殊性和要求的多样性,主体与显示单元之间连接也采用RS485 Modbus-Rtu协议连接,提高了显示与控制的可靠性。
3、软件可靠性设计
3.1实时多任务的调度
保护器起着保护电动机的重任,对它的要求是既不能误动,也不能拒动,而且必须快速。实时多任务的调度实际是通过时间片的轮换实现宏观上的多任务效果。对于保护器而言,存在着三个重要的任务,等间隔的交流采样,根据算法得到稳态与暂态电量数据;根据得到的数据判断故障,故障计时、清零和脱扣输出;人机交互界面。下图以一个周波T=20mS,32点采样为例(考虑到快速除法),32次采样总时间为3.2mS,数据计算时间为9.72mS, 计时0.36mS,则人机交互的时间为6.72mS.这样的任务调度即满足了保护实时性要求,又较快的响应了参数设置。
3.2 交流采样、数字滤波
对于交流正弦信号,一个周期的电压有效值为
根据电工原理中连续周期交流信号的有效值的定义,将连续信号离散化,用数值积分代替连续积分,从而得到有效值与采样值之间的关系。离散化得到
同理

在对信号多次采样的基础上,通过软件算法提取逼近真值的数据。这种算法计算连续的周期的交流信号,高,抗波形畸变能力强。在使用这种算法时,也可同时采用连续平均值法、中值算法等数字滤波,提高保护器的抗干扰能力。
3.3 软件陷阱
程序是固化在微处理器的存储器中,由编译器统一安排,但设计时,设计人员考虑到产品的扩展性,一般留有余量,也因此总有些存储空间会未被使用。当微处理器的PC指针因为干扰被错置时,系统就会出错。软件陷阱就是在不用的存储空间、中断入口、子程序后加入强制跳转指令,让出错的PC指针恢复正常。
方法是: NOP
NOP
JSR MAIN
4、结束语
本文针对低压智能电动机保护器在实际使用中遇到的各种电磁兼容问题,根据微处理器系统的特点从硬件和软件两个方面,提出了抗干扰方法,获得了良好的EMC性能。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。