引言
电子稳定系统(ESP)、制动防抱死系统(ABS)和驱动防滑控制系统(ASR)的扩展是汽车主动安全装置的一种形式。在紧急情况下,能辅助驾驶员自动控制汽车,在汽车侧向力还未达到地面附着力前提下,通过对驾驶员的动作和路面实际情况进行判断之后,对汽车的行驶状态进行及时的干预,以保持汽车的稳定的行驶。本文以某型轿车为研究对象,以横摆角速度作为汽车稳定性控制的主要变量,控制方法采用PID控制,设计PID控制器,对汽车ESP进行仿真研究。
1 整车模型的建立
汽车整车模型的建立采用的是比较先进的计算机自动建模的方法,即利用ADAMS/CAR建立非常直观形象的物理模型,其能够比较真实地反映出汽车动力学特性。需要建立的汽车子系统模型有:前后悬系统、转向系统、发动机系统、前后轮系统、制动系统模型等。整车模型建立完成之后,通过蛇形试验对模型的合理性进行检验。
2 理想二自由度模型的建立
在仿真过程中控制系统需要实际横摆角速度和理想的横摆角速度作比较,因此需要建立汽车理想参考模型如图1,通常是建立二自由度线性单轨模型来计算得到汽车的参考横摆角速度。
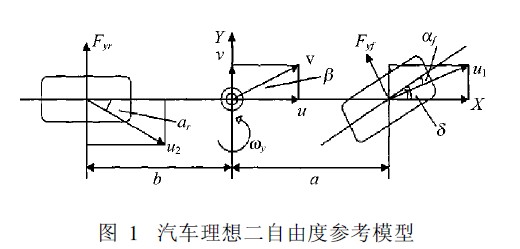
图1中Fyf为前轮所受侧向力、Fyr为后轮所受侧向力,u1为前轴中点速度,u2为后轴中点速度。
由图1可以得到汽车运动方程:

其中:

将式(2)代入式(1)进行拉氏变换得到二自由度单轨模型传递函数,然后化简可以得到理想横摆角速度公式:

3 PID控制器的设计
PID控制器是一种线性控制器,控制原理如图2所示。在PID的调节下,控制器对误差信号分别进行比例、积分、微分3种运算,其结果加权和构成系统控制信号,传递给被控对象加以控制。

PID控制器的数学描述形式为:

式中:Kp、Ki、Kd分别称为比例系数、积分系数、微分系数,控制的过程中通过调节这3个系数大小就可以达到良好的控制效果。
ESP对于控制变量横摆角速度,采用PID控制方法,设计PID控制器。
4 仿真控制系统设计
整个仿真控制系统由3部分构成:ADAMS汽车模型、汽车参考模型以及PID控制系统。图3为基于PID控制的仿真控制系统图。

4.1 单移线转向仿真
(1)仿真条件:单移线仿真即汽车在规定的时间内,通过一个S型曲线样式的道路模拟汽车的变道动作(汽车模型、汽车参考模型的输入信号正弦输入)[3],汽车档位在5档,速度为85km/h,地面附着系数为0.6,开始转向时刻为1s,转向持续时间为3s,转角为100#。
(2)图4为有、无ESP控制行驶轨迹图,图5为单移线条件下横摆角速度变化曲线,图6单移线条件下质心侧偏角的变化曲线。


从图4中看出,有ESP控制的汽车行驶稳定,能按预期轨迹行驶;无ESP控制的汽车,出现后轮侧滑,失去行驶稳定性。从图5~6中可以看出,没有ESP控制的汽车其横摆角速度和质心侧偏角迅速增大,说明汽车后轮侧向力达到地面附着极限,导致汽车行驶的各状态变量发生急剧变化,无法按照驾驶员预期轨迹行驶,出现甩尾现象。

4.2 蛇形穿越仿真条件
(1)仿真条件蛇形驾驶穿越仿真试验是用来对汽车的过度响应和侧倾稳定性进行评估。执行蛇形驾驶时,首先向一个方向转到设定的转向角,然后反方向转到设定的转向角。以此类推,仿真在完成第五次转向过程。档位5档,速度为80km/h,地面附着系数为0.6,蛇形穿越。
(2)图7为有、无ESP控制行驶轨迹图,图8为蛇形穿越条件下横摆角速度变化曲线,图9为蛇形穿越条件下质心侧偏角的变化曲线。

由图7可知,在一个蛇形穿越时出现不稳定工况,加入ESP系统之后可观察到,ESP系统,能使汽车按照预期轨迹稳定行驶。
从横摆角速度和质心侧偏角上分析,由图8、9可知,无ESP系统控制的汽车,其横摆角速度和质心侧偏角发生突变,说明汽车在做蛇形行驶的过程中出现了不稳定的状态。


5 结语
采用ADAMS/CAR建立了直观的三维汽车模型,其各部分的运动和响应接近实际汽车情况,能够比较真实地反映出汽车的动力学特性。通过ADAMS/Controls确定模型的输入输出变量,并导出汽车模型,在Simulink下建立ESP的控制系统模型,将ESP控制模型与汽车模型相结合,实现了基于ADAMS/CAR和MATLAB的汽车ESP系统的联合仿真,仿真结果具有可信性。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。