据设备管理权威机构统计,有50%以上的设备运行故障是由螺栓问题引起的,因螺栓问题而造成重大事故的数量也非常惊人,因此新的设备安装和检修规范都对螺栓紧固力矩要求非常严格,尤其是承受载荷及强烈冲击振动的重型机械设备,需要控制联结螺栓的预紧力。但所需预紧力又很大,再加空间条件限制,不能采用大规格工具,就必须使用扭矩扳手。而作为扭矩扳手关键部件的控制器对其性能影响很大。本文提供了一种可以显示拧紧扭矩值、转角值,并能按预定设定的扭矩值、转角值拧紧螺栓的电动扳手控制器的解决方案。
1 可控电动扳手控制器硬件设计
可控电动扳手控制器硬件电路框图如图1所示。
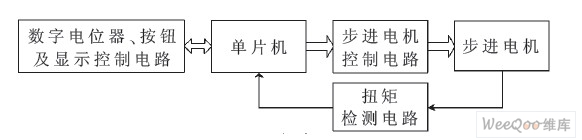
图1 可控电动扳手控制器硬件电路框图
1.1 数字电位器、按钮及显示控制电路
单片机选用STC12C5A60S2作为控制器。该机是单时钟/机器周期的单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,工作电压范围为5.5 V~3.3 V;工作频率范围为0~35 MHz,相当于普通8051的0~420 MHz;1 280 B片内RAM数据存储器;四个16位定时器;可编程时钟输出功能;全双工异步串行口(UART),兼容普通8051的串口;先进的指令集结构,兼容普通8051指令集。电平转换芯片采用LM2575,输出5 V直流电压作为供电电源,电路图如图2所示。液晶显示采用LCM 128645ZK模块,使用五个按键分别用来控制步进电机正转、反转、扭矩设定、转角设定及清零,数字电位器用来设定扭矩值和转角值,电路如图3所示。
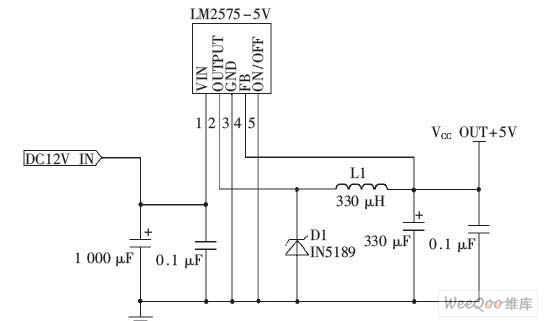
图2 电平转换电路
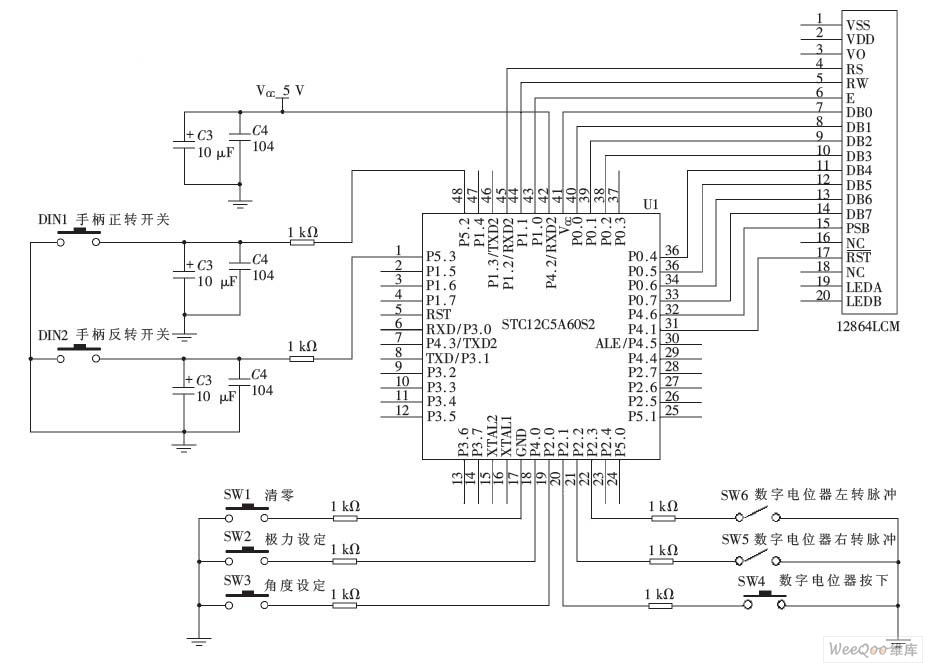
图3 键盘、显示电路
1.2 步进电机控制电路
步进电机驱动器采用HP公司生产的UDK5214NW-M5相步进驱动器,驱动器控制采用ULN2003芯片,该芯片的三个输出口分别用来控制步进电机换向控制继电器、步进电机驱动器工作停止继电器及报警工作,再通过继电器控制步进电机驱动器,该驱动器步进脉冲由单片机P1.4口输出,进而驱动步进电机。步进电机控制电路如图4所示。
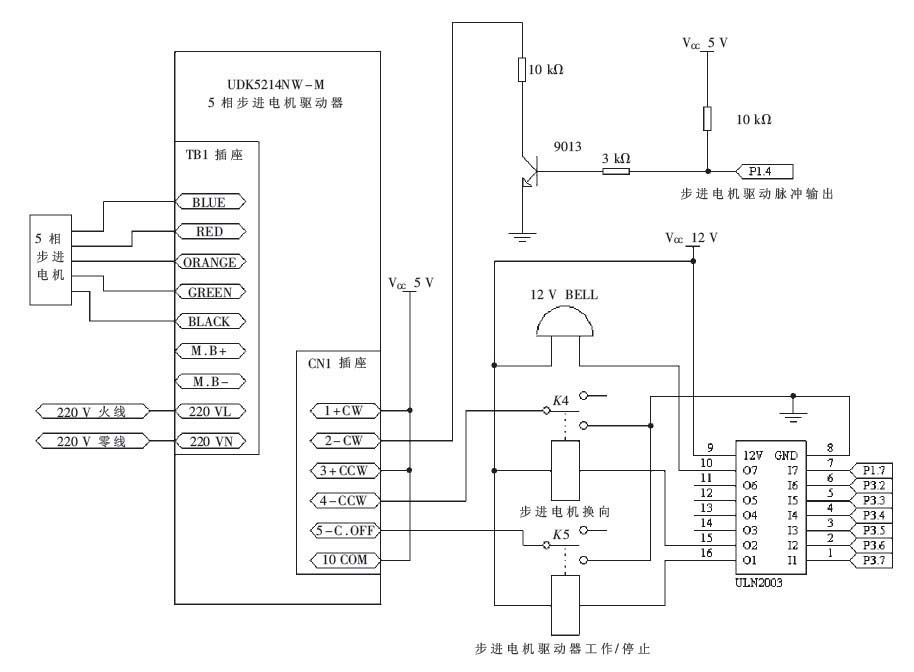
图4 步进电机控制电路图
1.3 扭矩检测电路
扭矩传感器选用BS914型扭矩扳手专用信号耦合器。该耦合器可直接输出1 V~5 V电压信号,该扭矩反馈信号经P1.5口输入单片机,经单片机处理转换成数字信号,再与扭矩设置值相比较,进而控制步进电机是否转动,连接电路图如图5所示。
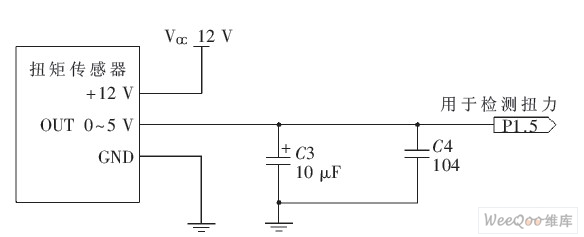
图5 扭矩检测电路
2 可控电动扳手控制器软件设计
可控电动扳手控制器软件由控制器初始化程序、键盘扫描及处理程序、步进电机控制程序、扭矩检测程序等组成。控制器通过键盘扫描及处理程序检测扭矩、转角值输入与否,并判断电机转动方向,如正转,则通过步进电机正转控制程序,控制电机正转,并由扭矩检测程序进行输出扭矩的检测,直到扭矩和转角达到预定值为止;如反转,则由步进电机反转控制程序,控制电机反转,直到转角达到为止。扭矩检测利用STC12C5A60S2单片机P1.5ADC口,使用时设置该端口为开漏输入,作为ADC口使用。该程序主要完成ADC口的转换开启、数据读取、软件滤波及输出显示等功能。
本文设计的可控扳手控制器采用STC12C5A60S2单片机作为中央处理芯片,利用较少的外围设备,使其结构简单。对制作的样机进行测试,测试结果显示该样机性能稳定、测量准确、使用方便、技术参数都达到了设计要求,具有一定的实用价值。
[1]. LM2575 datasheet https://www.dzsc.com/datasheet/LM2575_1117125.html.
[2]. ULN2003 datasheet https://www.dzsc.com/datasheet/ULN2003_500970.html.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。