摘 要: 针对移动机器人控制系统设计和开发要求的复杂性, 从成本低、易开发、易调试和高集成性的角度出发, 提出了一种基于微处理机控制单元(MCU )和复杂可编程逻辑器件( CPLD )的智能移动机器人控制系统设计。给出了自动避障、电机驱动控制、红外遥控等关键功能的设计实现方法, 着重对基于CPLD 的超声波检测模块、红外编码模块、壁障模糊控制器的设计等进行了详细的论述。同时, 还给出了系统主程序和超声测距子程序软件设计流程。实践结果表明, 该移动机器人控制系统可使硬件结构大大简化, 并具有功能丰富、集成度高、性价比高等特点。
0 引 言
近几年来, 移动机器人研究技术取得了很大进展,许多科研成果被应用到实际产品中, 同时, 对于机器人的部分 控制器的选择也从传统的单片机发展到DSP及嵌入式微处理器ARM。随着技术的发展, 单片机的集成度也越来越高, 而对于一些干扰源较少、环境适宜的工作场合, 比如居家、写字楼等, 使用单片机作为主控制器, 在开发成本和调试方面都有一定的优势;另外, 考虑到机器人底层控制系统外围电路的复杂和单片机资源有限, 采用CPLD 作为外部扩展芯片, 可以灵活设计与外围器件接口电路。
针对机器人控制系统设计和开发要求的复杂性, 笔者从成本低、易开发、易调试和高集成性的角度出发, 提出一种基于MCU和CPLD设计智能移动机器人。
1 移动机器人的车体结构
考虑到移动机器人灵活性和稳定性, 本研究采用4 轮圆底盘结构, 驱动轮处于车身左右两侧, 前后两个万向轮作为从动轮, 主要起支撑作用, 能实现转弯半径的化, 即原地转圈 。每个驱动轮由一微型步进电机驱动。
根据移动机器人功能, 可以把整个系统分成3个功能层: 控制及显示层、传感测量层和电机驱动层。机器人车体结构总体方案设计如图1所示。
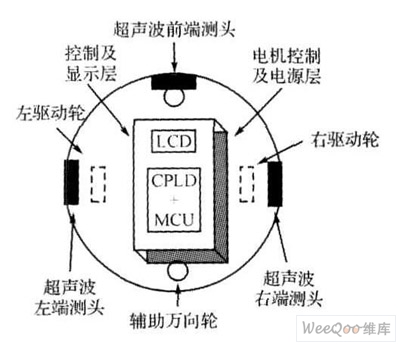
图1 移动机器人车体结构设计简图
全文PDF:
[1]. CPLD datasheet https://www.dzsc.com/datasheet/CPLD+_1136600.html.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。